|
|

樓主 |
發表於 2016年9月15日 10:30 PM
|
顯示全部樓層
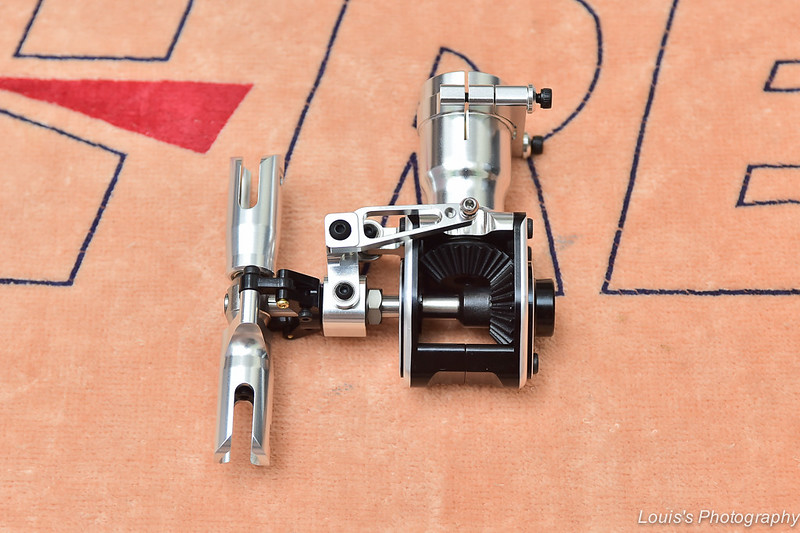
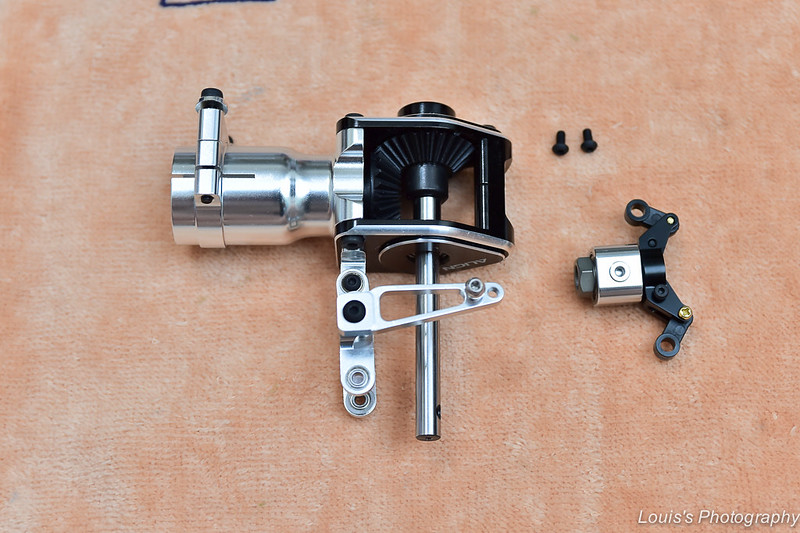
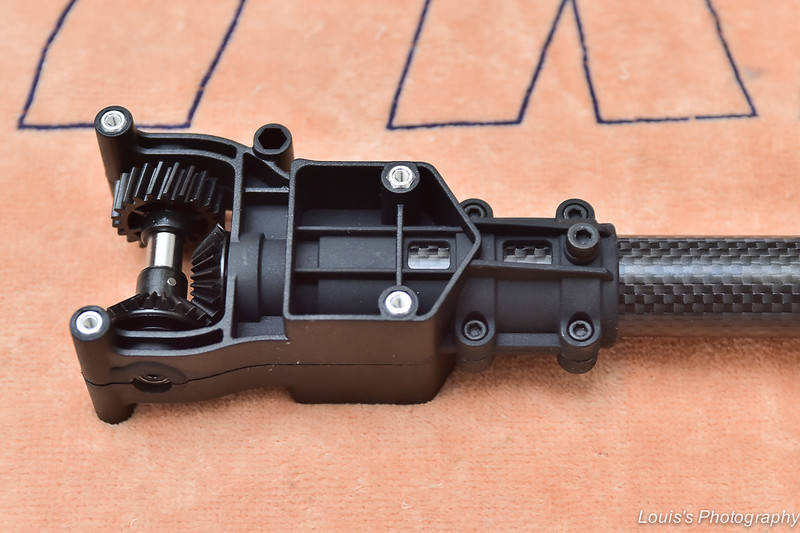
接著準備把尾管總成準備安放到機身。

終於要準備上尾管總成了。
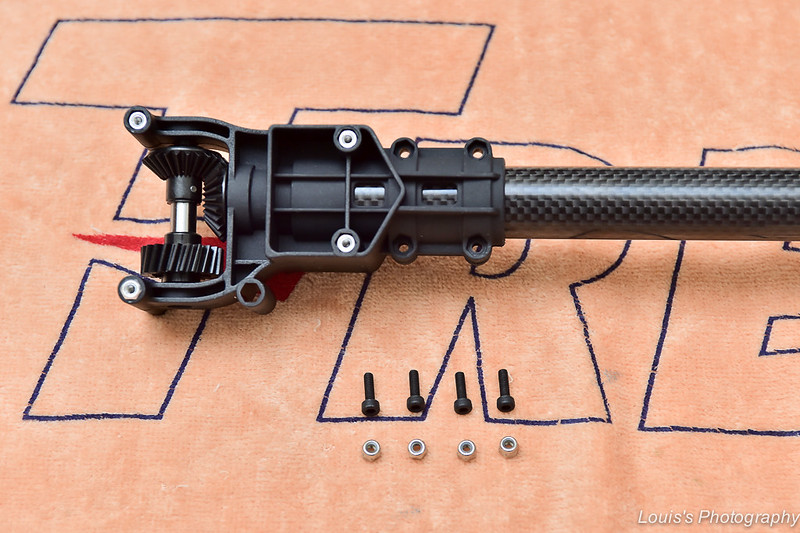
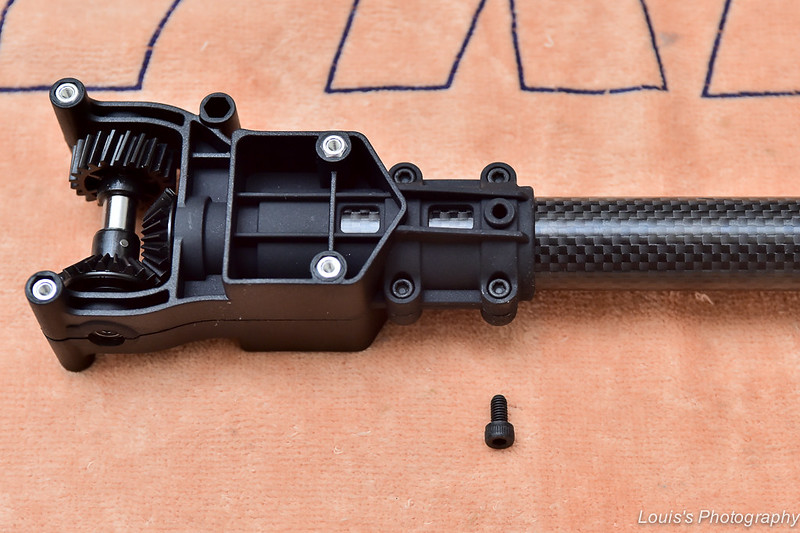
固定尾管總成的螺絲也建議二二採二邊同時上鎖鎖緊的方式。鎖好後,再逐一拆開上膠。
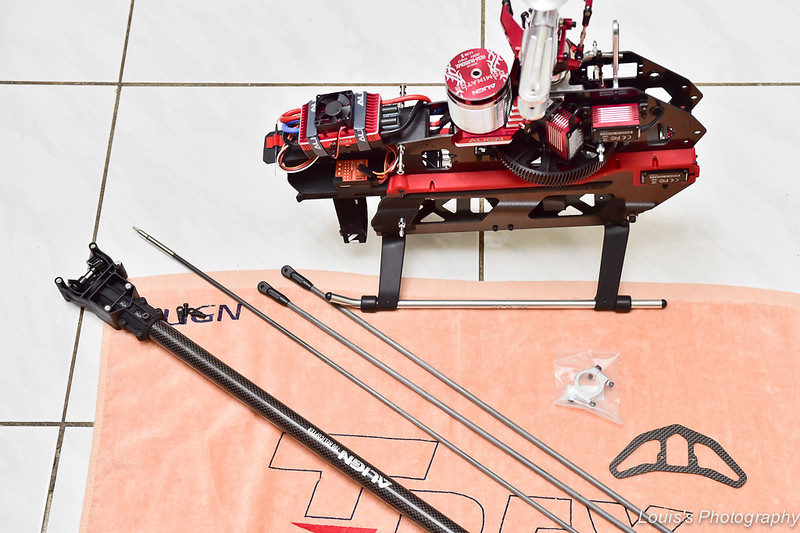
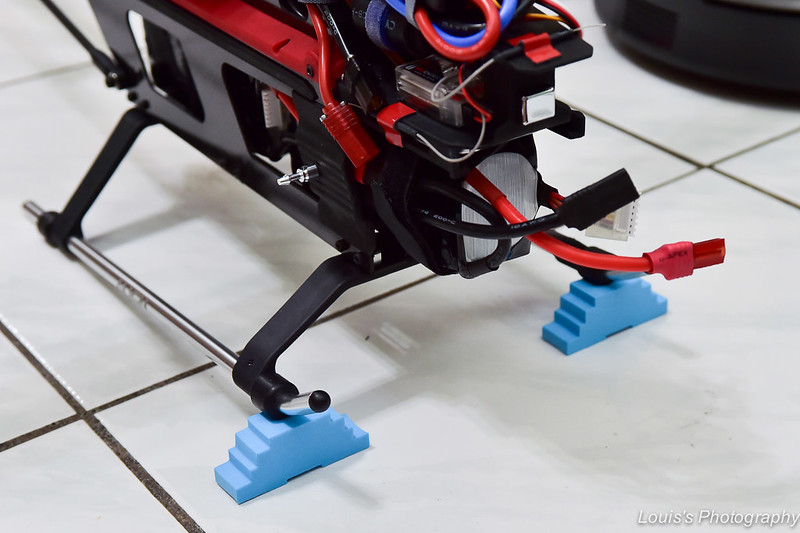
哇! 好翹啊 ^^"。這5度前傾式俯衝式腳架真是殺。

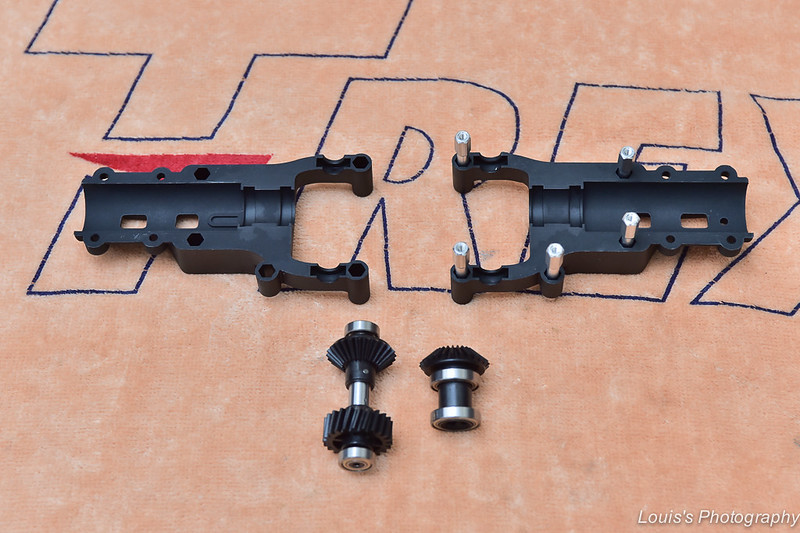
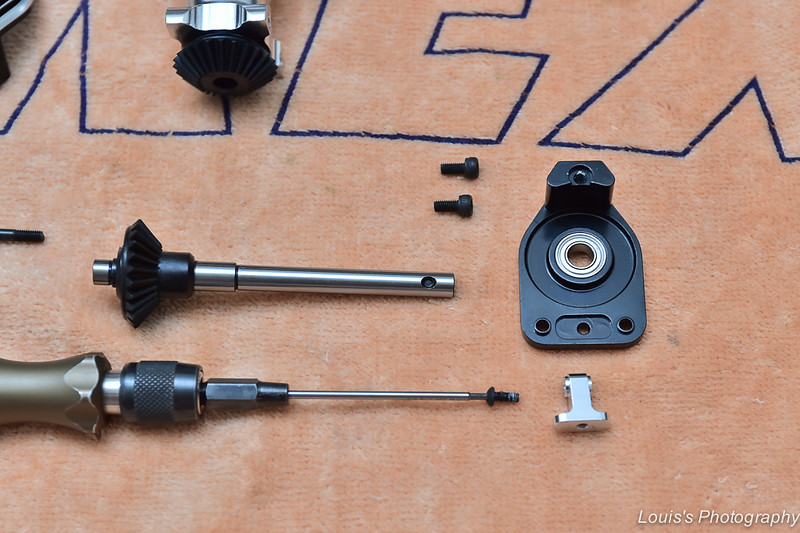
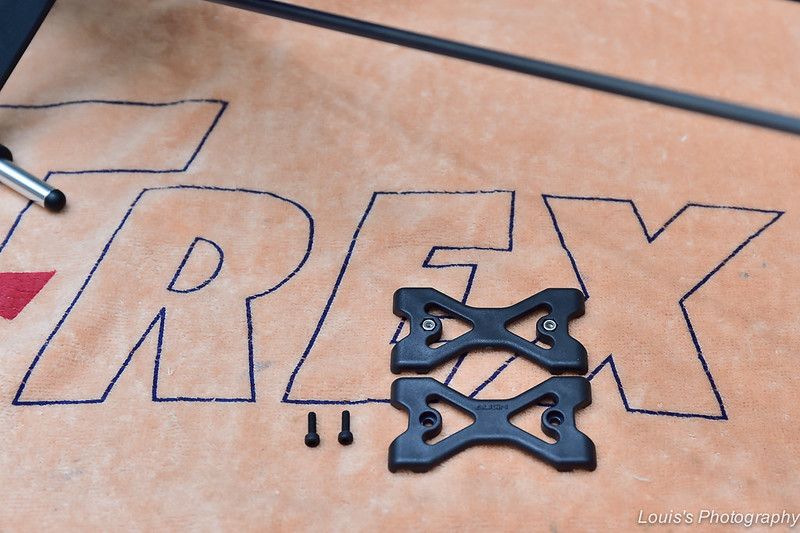
尾管支撑組安裝
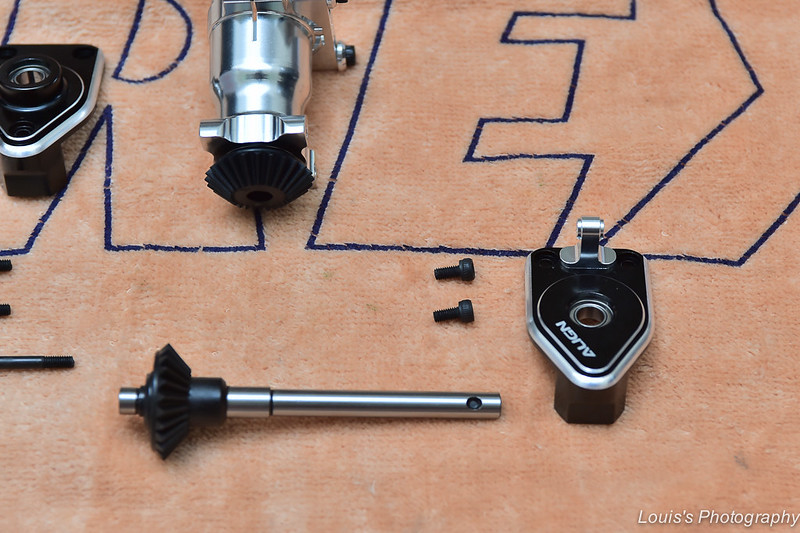
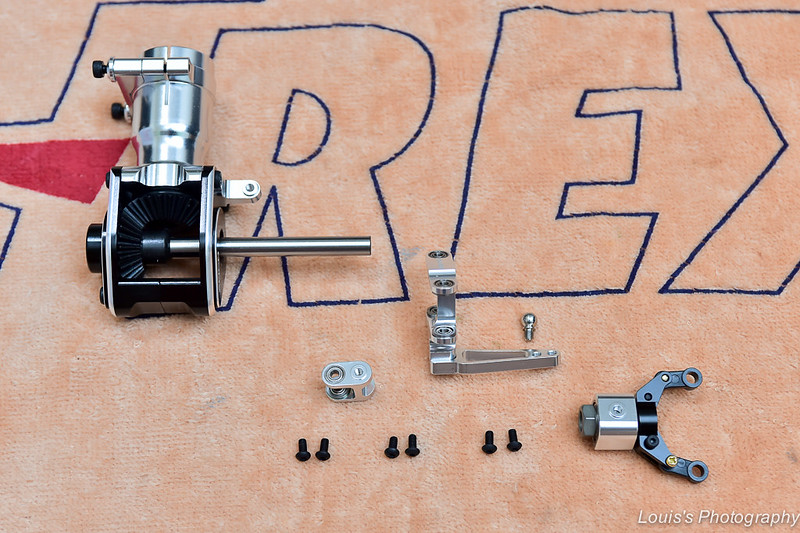
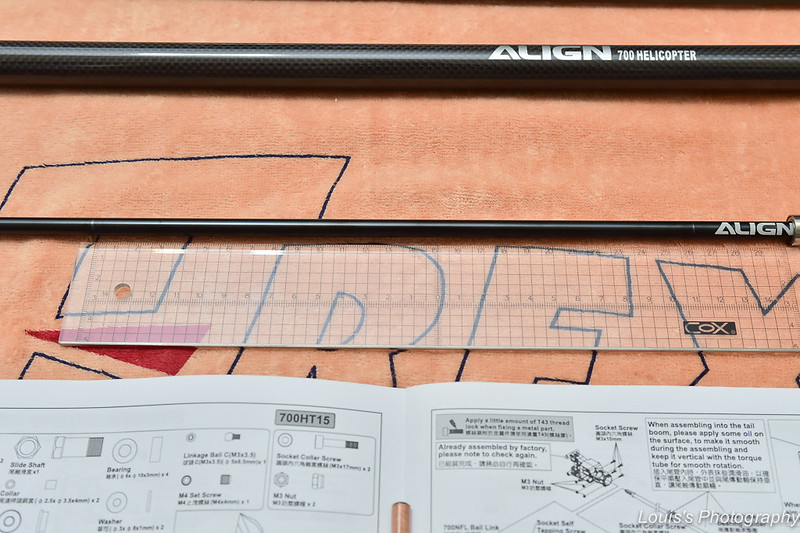
把尾管支撑組,水平翼及水平翼固定座拿出來。而等一下尾管支撑組在鎖時,桿頭上的ALIGN字樣要朝外。
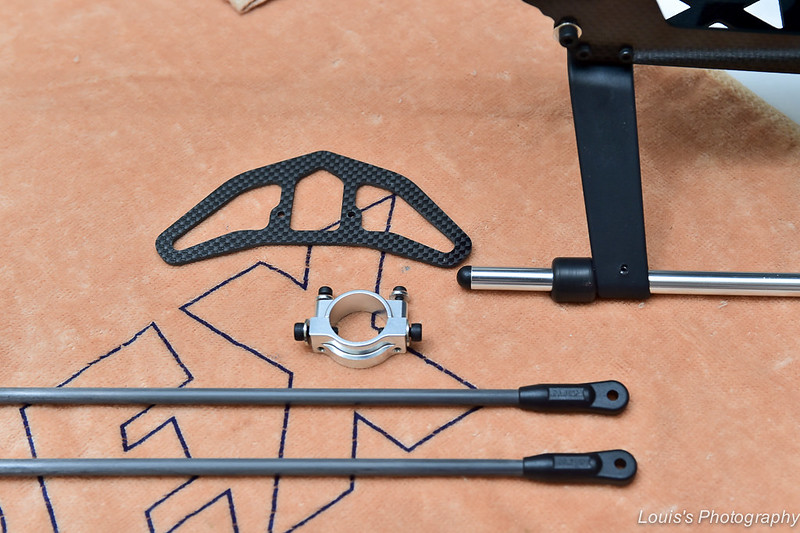
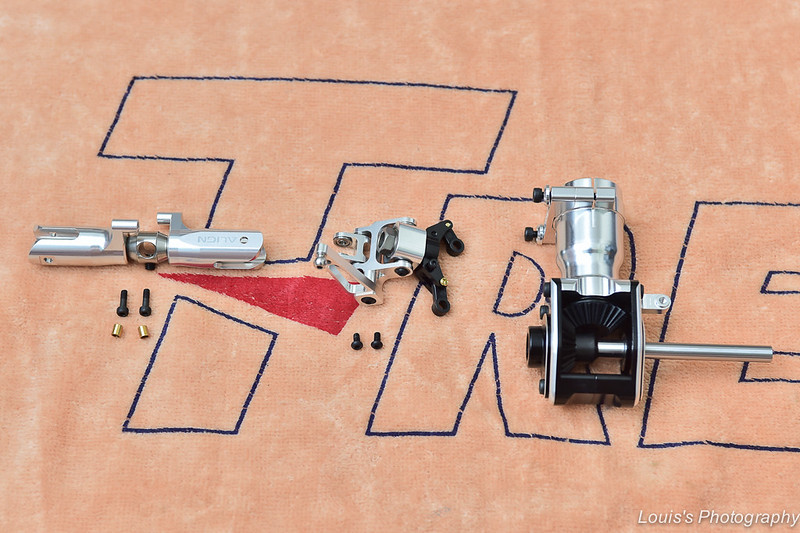
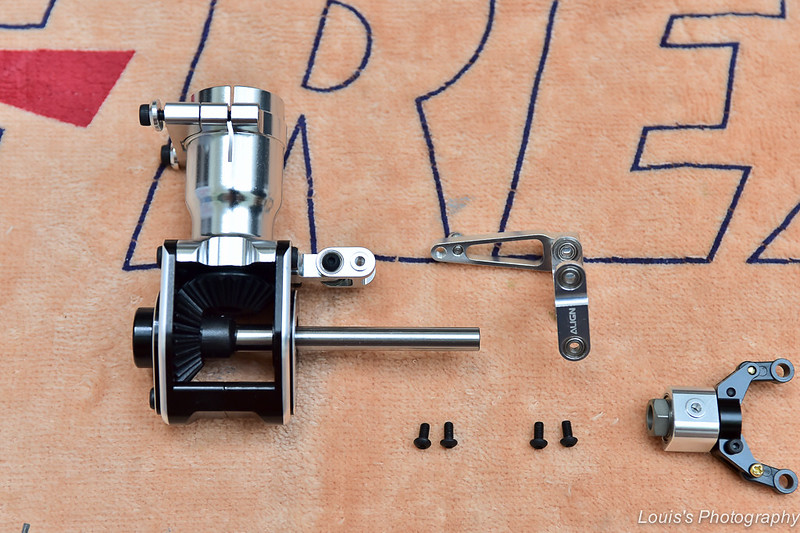
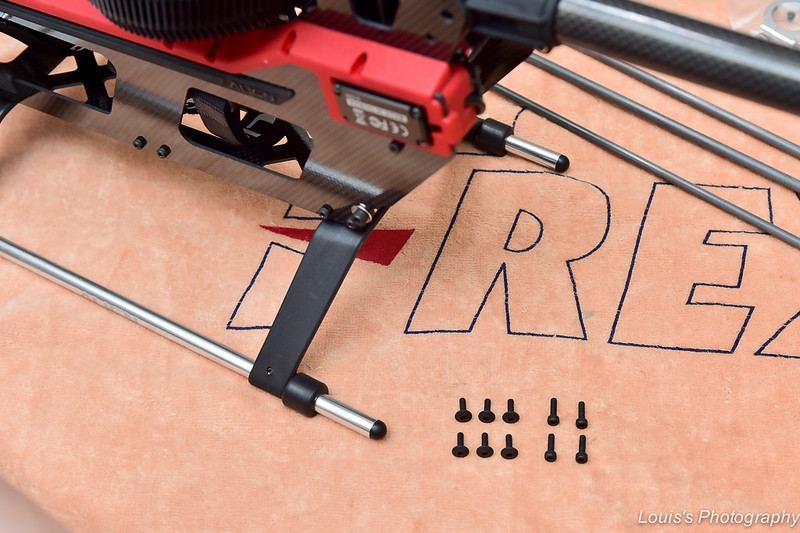
量好水平翼固定座在尾管上的位置後,建議在這裡先繞上一圈膠帶來提高固定力道。
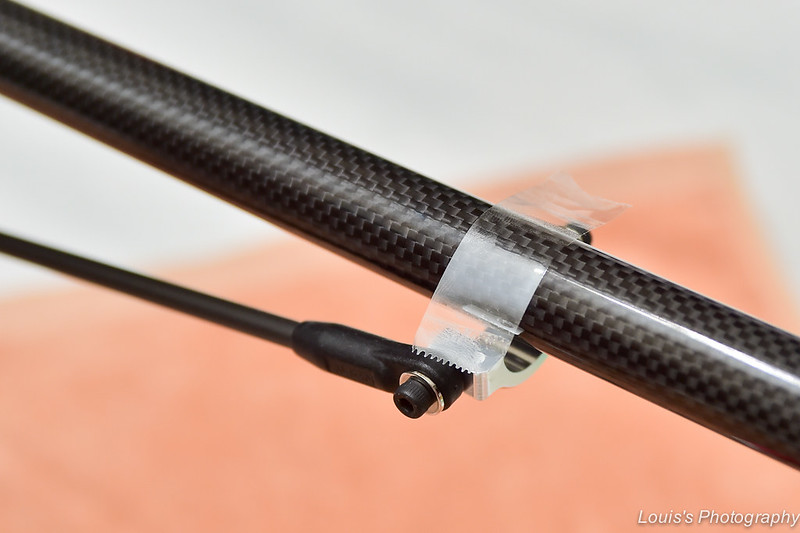
而個人習慣會安裝尾支撐桿固定片,但這不含在700X套裝裡,是選購品。

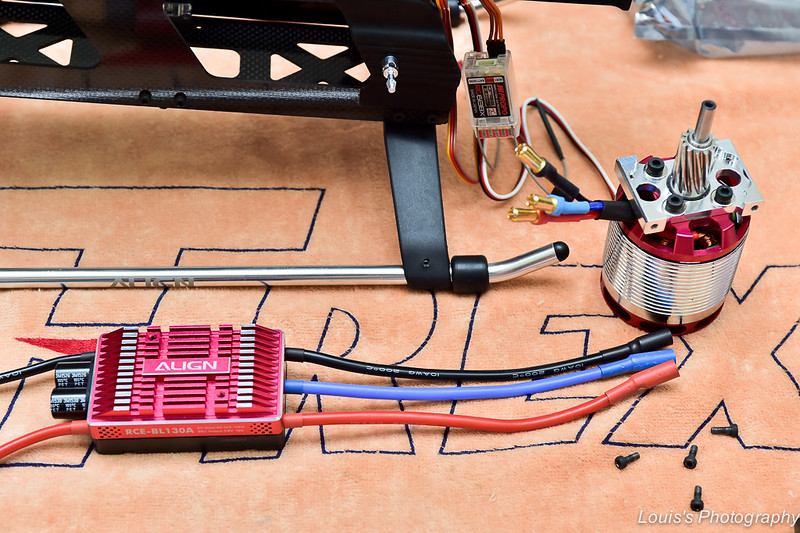
130A油門校正
全機安裝好後,開始做最後的調機,這時還不要上主旋翼。因為在這時是使用12S動力電池供電,所以要先完成130A油門校正。注意這時130A是線性油門模式,校正完後油門推過5%馬達就會轉動。所以遙控器的HOLD要設定在0%,如果你的遙控器有 THRO Cut功能,建議也可啟用 THRO Cut功能,並設定在 0%,做為雙重保險。
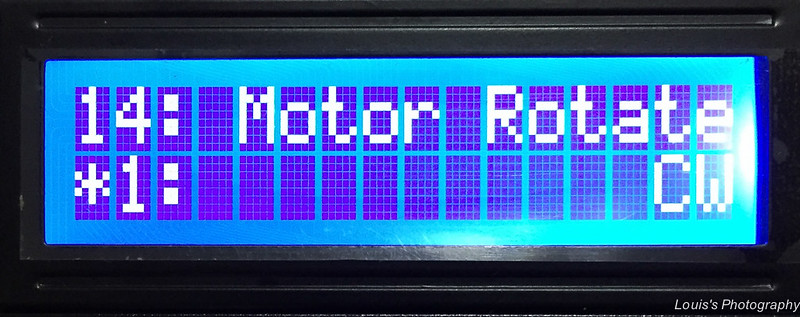
所以遙控器Normal 油門曲線 0-50-100,關閉HOLD及THRO Cut功能,油門推到100%時 130A送電,在聽到130A發出校正音後,油門再拉回0%。130A等一會時會再發出校正音,這時130A的油門校正就完成了。這時輕推油門過5%看一下馬達轉動方向是否正確。如果馬達轉動方向錯了,原則上主旋翼是不會轉動的,這時就要用設定卡連上130A,進入功能14,把馬達轉動方向反向。
MB+ 調機前準備
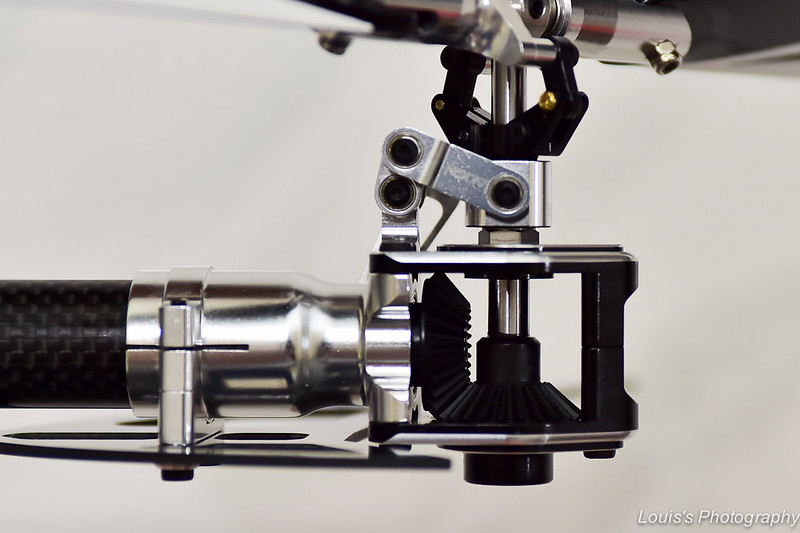
這時把主旋翼安裝上去。另外在調尾舵左右行程時要特別注意DS820M/DS825M在干涉時是沒有吱吱聲的。加上700X 右自旋行程,滑套靠近尾齒箱時尾翼控制軸承套組是內凹,怕調尾舵DS825M到底會干涉沒干涉音而不知,可先拆連桿後把尾舵控制臂打到底,沿著尾齿箱用鉛筆劃上記號,再以這記號為基準調整右自旋行程,再抓點空間即可。不然DS825M因為每次都打不到訊號指定的定位因而不斷的撞擊,這樣沒幾趟下來,DS825M 就容易燒毀,這部分一定要小心調整。
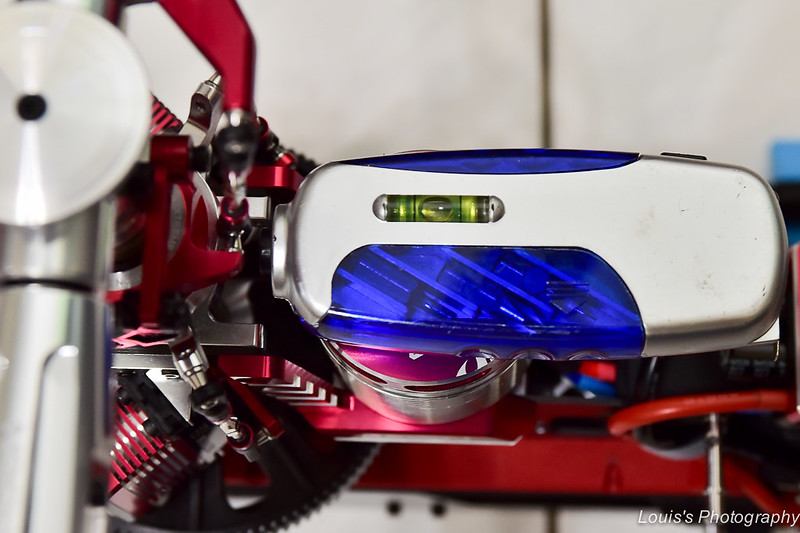
雖然700X的五度前傾式腳架不會影響調機的結果,但為求精準,還是以馬達頂端平面為基準來配平。把腳架前端墊高,再用氣泡式水平儀量測。
把氣泡式水平儀放置在馬達頂端,調整腳架墊高的程度,直到確認前後左右都為水平。
MB+調機
進入MB+的設定模式到功能D,並調整尾連桿長度直到尾旋翼尾軸滑套中立點有2-3度右自旋螺距夾角。如其舵臂如無法在正垂直的位置,在考量尾拉桿夠長的前提下則以略偏機首的齒位效率較好。因為以2-3度右自旋螺距來說,左自旋的滑套行程比右自旋的滑套行程來的長。然而舵臂是圓周運動,如舵臂旋轉角度過了45度愈遠,其實水平方向的有效移動距離是愈來愈短。
於是,略偏機首是偏右自旋螺距,這樣在左右行程上是最有效率且線性度最好的。如果偏尾,則右自旋的舵機移動線性度沒問題,但左自旋時滑套接近行程尾端時,舵機要移動較大量才能推進一點。
但有的機子因為拉桿長度不足,導致略偏機首的齒位,拉桿頭螺紋會吃不夠深,所以只好略偏尾的齒位可讓拉桿頭吃足夠螺紋,但這樣就犧牲了左自旋滑套尾段舵機行程的線性度及效率了。

功能E : 尾舵行程量設定。
設定時,可以慢慢的一次打一點尾舵直到滑套到達邊界且不干涉為止。這時尾舵搖桿回中再等一下,看到MB+指示燈閃了幾下再回到恆亮就表示這邊界已記憶完成。再移向另一邊重覆同樣動作。而恆亮時是紅或藍則看你是移向那一邊來決定。
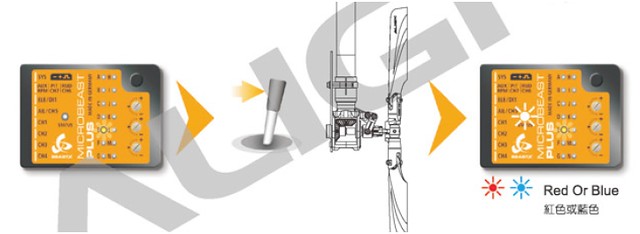
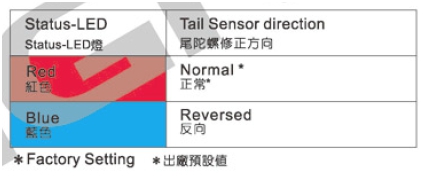
功能F : 設罝尾舵陀螺修正方向設定。
在這裡把直昇機尾波箱提起,左右來回晃。當尾波箱往左時,尾軸滑套應要往右;反之尾波箱往右晃時則滑套應往左。如果滑套跟你晃的同向則搖一下尾舵選擇另一個設定。
功能G : 設定十字盤伺服器中立點。
在這功能G就是要調三平,如同之前在3GX DIR裡一樣。
1. 伺服器舵臂水平。
2.十字盤水平。
3.集體螺距零度。
因為在之前電裝走線時,已完成校正了,在這裡掛上螺距規再驗證一次,不偏不移剛好就是0度。
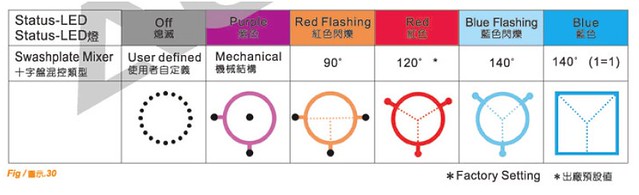
功能H : 十字盤混控形式選擇。
功能H也就是選擇十字盤種類。一般出廠值都已固定在紅燈,也就是 CCPM 120度。
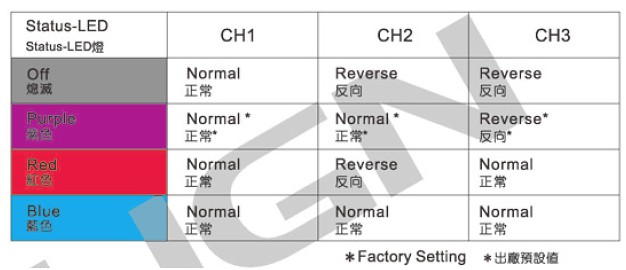
功能I : 設定十字盤伺服器工作方向。
在這功能時,往正集體螺距方向輕推一點油門,看三個CCPM伺服器是否同時住上?如果不是則搖一下尾舵切換到下一個設定,原則上一定會搖到一個可以讓十字盤同時往上的設定。接著油門搖桿試著往上往下移動,看十字盤是否同向的也往上往下。
功能J : 定義循環螺距六度位置。
這功能很重要,如同3GX/GPro在定義循環螺距8度一樣。配合螺距規,將旋翼轉至跟機身平行。這時循環螺距度數應為0度,如果不是請再回到功能G進行調整至0度。在確定為0度後,打副翼直到螺距規顯示六度,並同時觀察燈號是否從紅紫轉藍燈。如果在六度時轉藍燈代表這架機子機械混控比跟MB+很匹配。
如果在循環六度時是紅燈或紫燈.這表示伺服行程只有移動一點機體就有較大的偏/旋轉,這代表機子反應可能會反應過度。藍燈代表各方面解析度夠,沒有問題。而亮了藍燈很久才到六度表示,伺服移動行程過長才有六度。對於在機子反應上也會有影響,而且在機械結構上有可能影響到最大滾轉率。
野獸對伺服訊號要移動多少,產生幾度的循環螺距的比例匹配是有內建的標準。以亮藍燈時為基準來看,未到六度,剛好六度及過了六度,機子反應會有不同的特性。所以應是"紅燈轉藍燈剛好6度是最為剛好"。而這是客觀的從野獸的角度來看,但同時也跟伺服器的規格如速度,力矩有關及考量飛手的手感。而這700X 旋翼頭為FL,在到5度左右轉成藍燈,再繼續推到六度完成,表示它解析度足夠,手感應反應細緻。
功能K : 設定集體螺距行程量。
功能K是在設定最大及最小集體螺距的度數。這時油門推到最大,螺距曲線應在100%位置,這時再用副翼搖桿調整最大集體螺距的度數到您要的度數。調好後油門收到0,這時螺距曲線應在0%位置,同樣利用副翼搖桿來調整最小集體螺距的度數。目前是調整到正負12度,

功能L : 設定十字盤最大傾斜範圍。
在功能L,如同3GX/GPro裡的循環環,用在限制升降、副翼最大的範圍,這時打升降、副翼看是否有干涉或伺服器舵臂有進入鎖死角度的風險。這時您可以參考燈號的顏色,如果是都在藍色範圍內表示在合理的循環螺距角度,如果是顯示紫色或未亮表則是螺距角度太大或不足,這時建議再調整之。
在這裡要很小心調整,因為700X是FL旋翼頭但降高度使用DFC主軸,要調整邊界避免干涉。尤其在最大正集體螺距時前推後拉升降時,控制臂不能干涉到主旋翼頭的主軸固定螺絲。以及左右打副翼時前方2,3 號舵機的舵臂不能干涉到馬達旁的機身加強片。
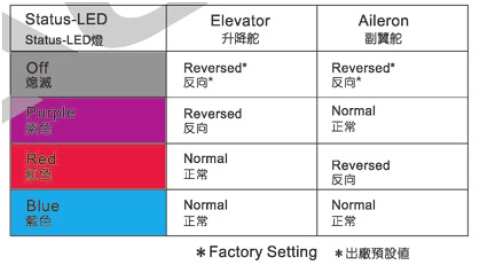
功能M : 設定十字盤感應器修正方向。
這時拿起直昇機前後左右搖動,觀察十字盤的補償方向,理應跟你搖動的方向相反。如果升降或副翼有一個補償方向不對,就搖尾舵選下一個組合。理應可以找到一個設定可同時正確修正升降及副翼。
而原本3.2.x版中的自旋優化方向在4.1.5/4.2中已取消了。想應是利用六軸感應的優勢,自動修正而不用再行設定。
MB+飛行特性設定
遙控器: JR XG11
D/R : Normal/IDLE : 100/0 (ELEV/AILE),
RUDD : Normal 100/20, IDLE:100/10
陀螺儀感度 : T. Lock : Normal :38%, ST1:35%,ST2:32% (XG11鎖定是0-100),也就是 Normal 時,調整遙控器的鎖定值,直到MB+鎖定燈號顯示為藍燈,鎖定值為G。
集體螺距: +-12度
循環螺距: 調至最大且不干涉
螺距曲線:
Normal, ST1,ST2
0-50-100 ( -12度,0度,12度)
野獸飛行設定(參數模式),這部分可以用預設值先行試機,以下也是我過去的經驗值。
(三旋鈕B1,B2,B3 以中間刻度為0)
B1: Cyclic Gain (十字盤感度)
B2: Direct Cyclic Feed Forward(MB+介入升降/副翼程度)
B3: Tail Dynamic (尾舵反應速度)
------------------------------------------------------
三感度旋鈕:B1+0, B2+0, B3+0, 原則上要3D的飛友,B1可以-1
功能A 傾斜盤-機體偏移微調,這功能用在當自旋會偏移時,可以用這功能來微調十字盤至自旋不會偏為止。
功能B 控制風格 : 藍燈 用遙控器控制
功能C 十字盤航道飛行穩定性 : 紅燈 普通
功能D 尾舵速率一致性 : 紅燈 普通
功能E 搖桿死區 : 紅閃 小
功能F 尾舵反扭力補償 :紫燈 關閉
功能G 循環螺距反應(跟手反應) : 藍燈 極激進
功能H 總螺距加速 (末端加速) : 紫燈 關閉
功能I: 油門反應:藍燈 極激進
功能B 可調整機體的反應速度由普通-運動-專業-極限 愈來反應愈快。或者用藍燈,由遙控器 EXPO 來調整之。
功能G 可調整跟手度,視個人手感調整之。
打算用以上功能試機,等試好機再跟大家分享試機心得。
地面試機
到這裡調機完成,準備進行地面試機。先把主尾槳拆了,電池電壓在3.83,也就是45.96左右。換算成轉速
45.96V x 490KV x 13T / 110T = 2661 RPM
送電後,油門慢慢由 5%一路推到100%,看各段油門的震動程度。不裝主尾槳時,到2660RPM一路都很順,尾管完全無震動。上尾槳,在2396 RPM尾管會麻一下,到2420就穩。只在2396這轉速,我想定速1900/2150應可忽略,也就是在0-2350,2420-2600都完全不震。但下星期會先好做定速標定,再只拆主槳測試在1700/1900/2200的轉速是否會震。
垂直尾翼防護膠條
雖然700X為前傾五度式腳架,垂直尾翼碰到地的機會不大,但還是在尾端用CA膠黏上防護膠條。

這膠條除了有防護作用外,在視覺上斜切的膠條也可做一個收尾的效果。主要700X在未上電池時,重心也會略偏後。上了膠條也可有保護作用。

到這裡全部完工了,等天氣好就可進行試機。試機除了調整MB+飛行特性外,重點要在做好轉速標定後,再拆主槳測試飛行用轉速下全機震動的狀況。

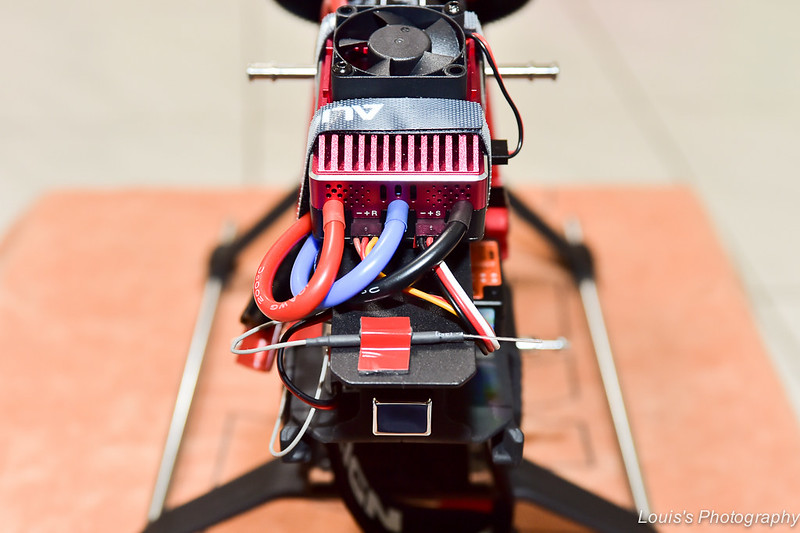
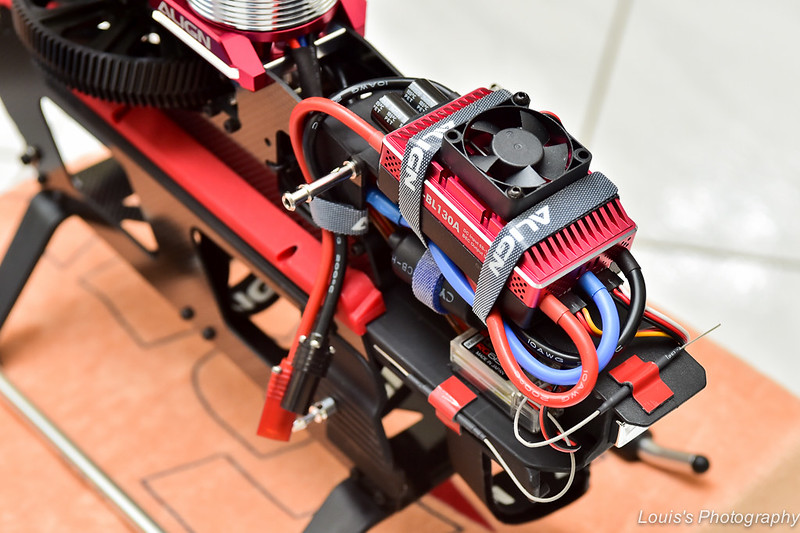
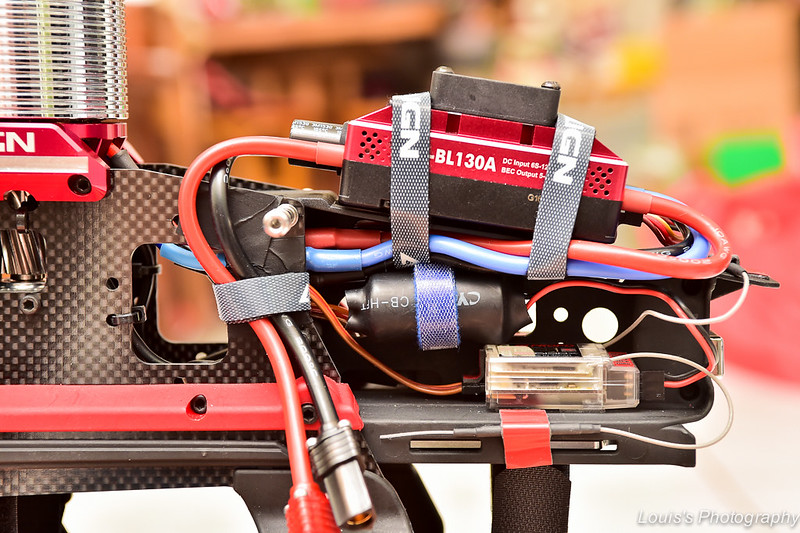
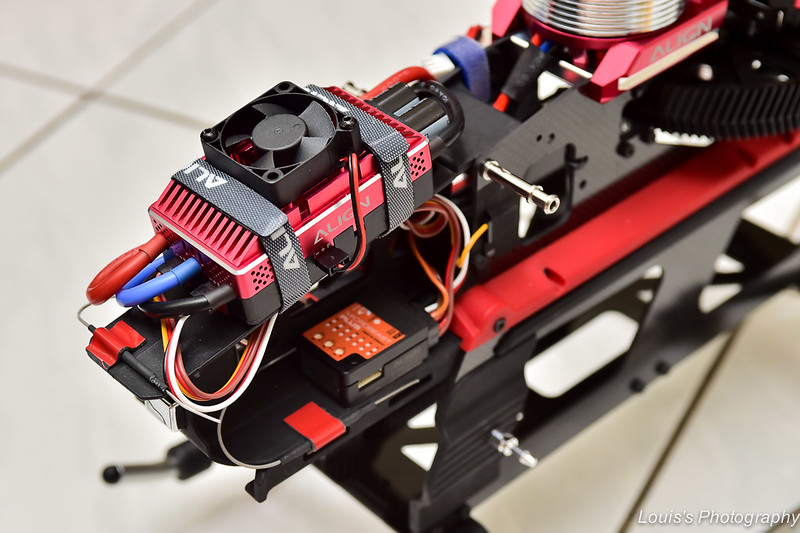
而機頭罩在馬達前方有開散熱孔,有助於飛行時馬達的散熱。

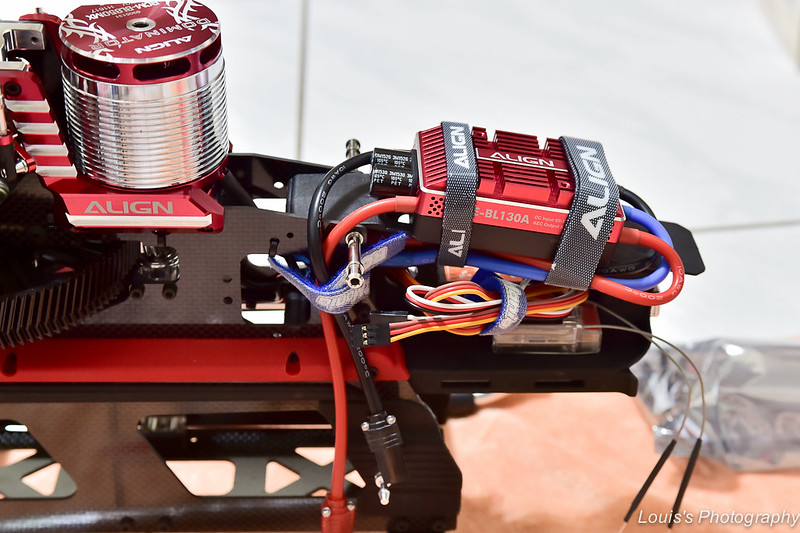
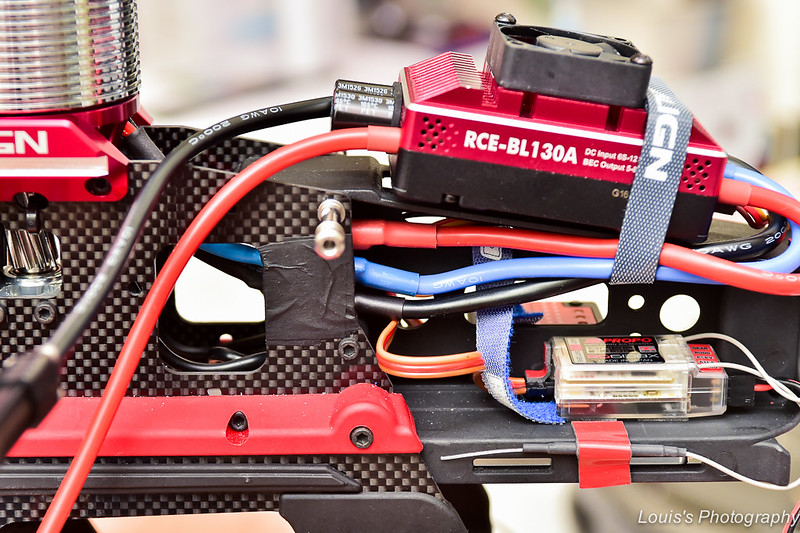
而在前方也有開散熱孔,幫助130A風扇散熱。如果你是按照原H座的設計把130A固定在H座後上方的進線孔前,這時130A的風扇應會剛好對齊這散熱孔。

而700X的機頭罩配了上半段的窄式機身,也做了有曲線的設計,有著另一種美感。
後記:
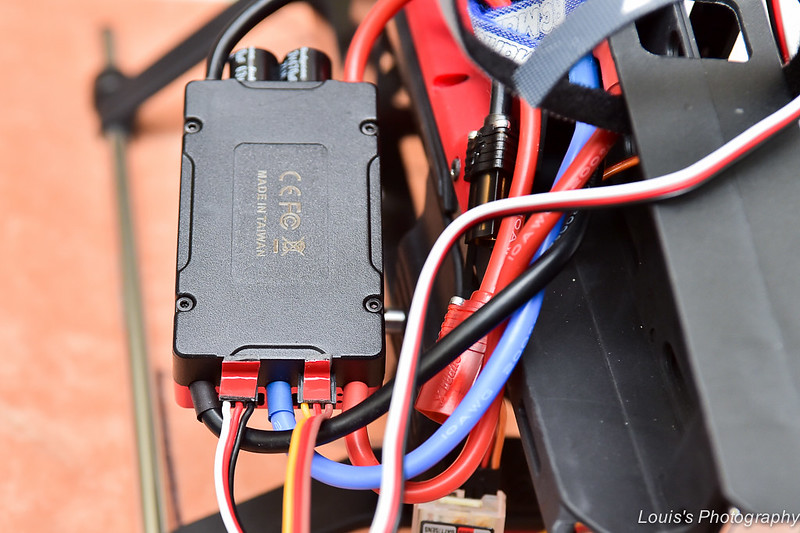
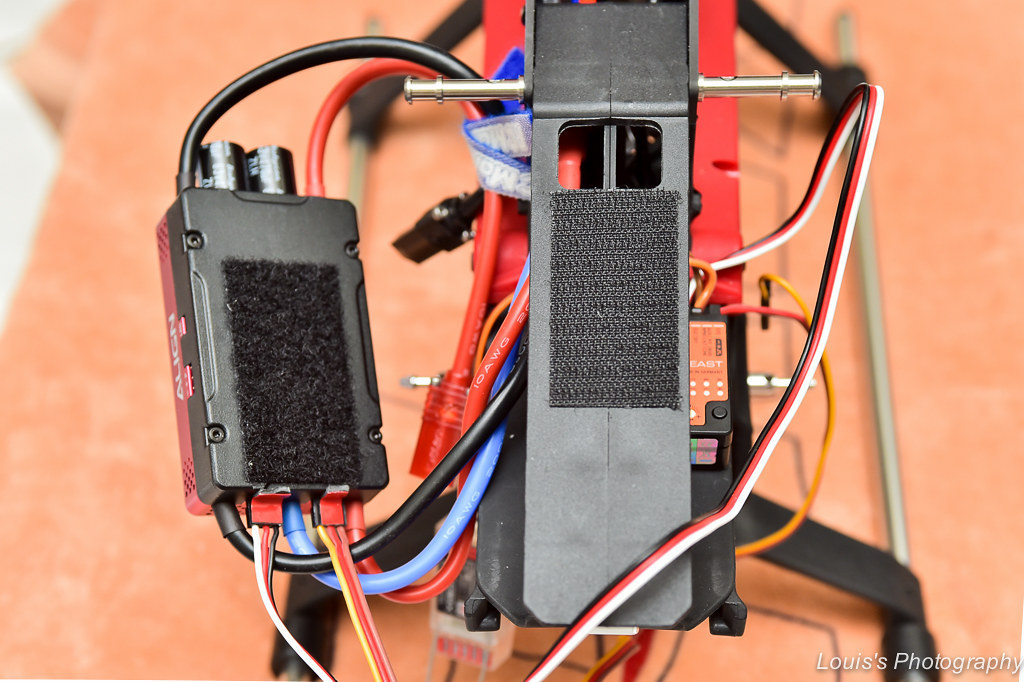
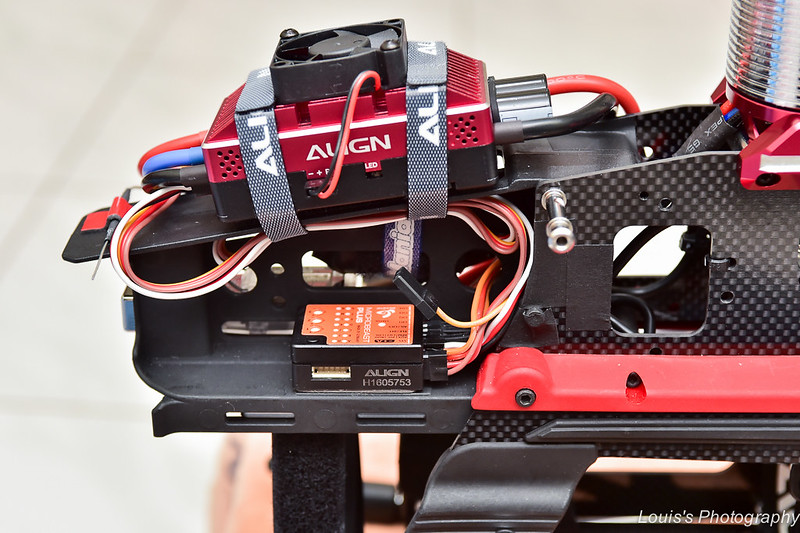
雖然完工了,但龜毛的個性又發作了。原本在H座另一側天線,應考量有電力線的經過,所以移至跟MB+ 同側。而MB+的訊號線接口以及沒用到的130A定速訊號輸出杜邦接頭用防磨的攝影用膠帶包好固定。
而天蠍星BEC備用電源固定在側板上,並用延長線接至接收的空埠。因為手上機子都是留有杜邦延長線,飛行時再接上備用電源。
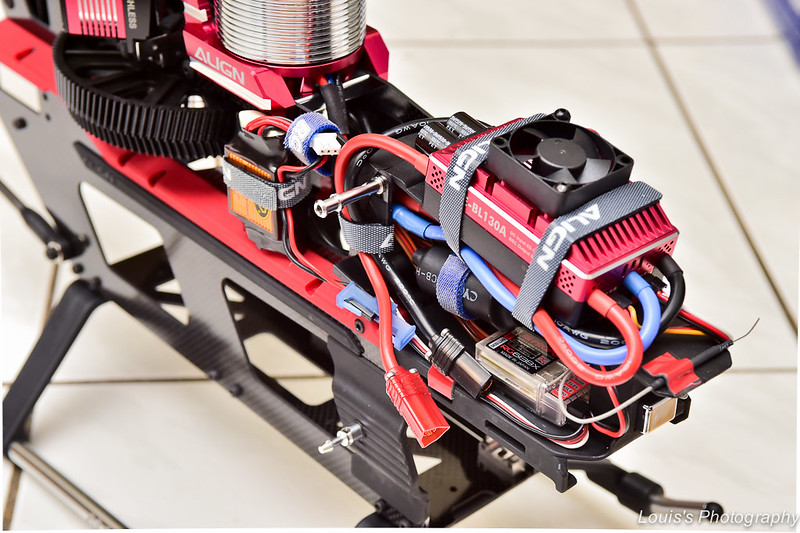
而130A電變略為前推,比原先未露在散熱孔要好一點。為何不前推至定位? 因為再前推時,風扇的固定螺絲會碰到機頭罩,當然這只是個人的取捨,就看每人不同的想法。另外機頭罩內側在固定墊圈周圍用玻纖膠帶貼好,提高強度。

等下星期試機完再跟大家分享試機心得。^^
|
|


 發表於 2016年9月15日 10:30 PM
發表於 2016年9月15日 10:30 PM