|
|
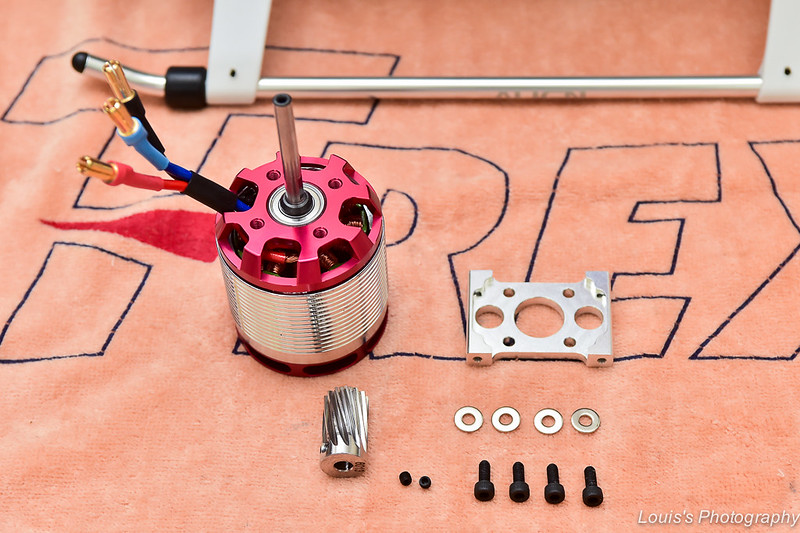
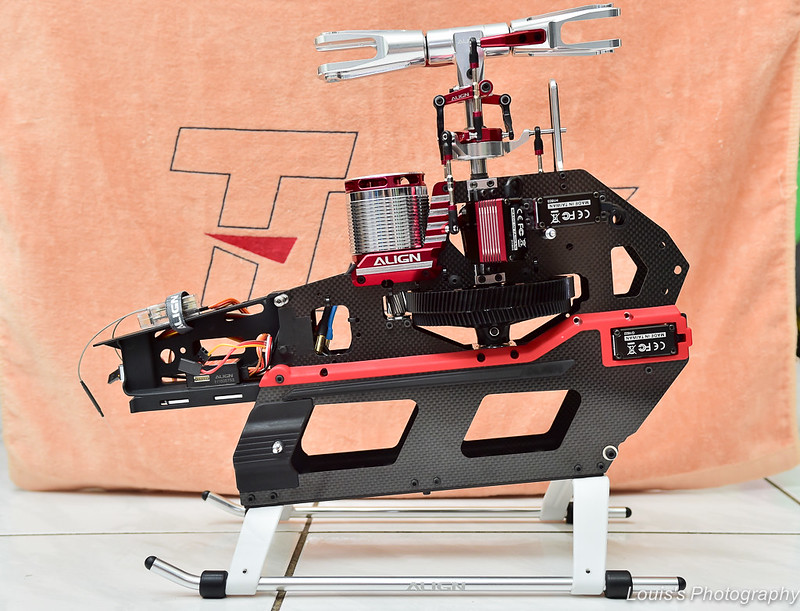
基本機身組裝完成後,接下來準備安裝電裝及旋翼頭組。而剛好這時Microbeast 公佈野獸+ 4.2版的更新(以下簡稱MB+),所以先來完成4.2版的昇級更新。
MB+ 4.2韌體/固件更新
主要是改進下列幾項,
1. 控制更精準, 穩定.
2. 在離地前機身能穩定, 不會有側倒問題.
3. 內部緩起動在搭配外部定速時可用StudioX取消.
4. 救機主要是加了震動偵測功能, 在不同姿態,依然能正確判斷機體姿態而正確的救機, 並讓救機控制能更精準及平順穩定.
韌體更新的功能可參考這裡, 中間有一個 Firmware version available 可展開有說明.
wiki.beastx.com/index.php/BEASTX_Devices/en
野獸更新要另購專用 USB, 接到 SYS 端口,
並至 Microbeast 官網下載 StudioX 程式
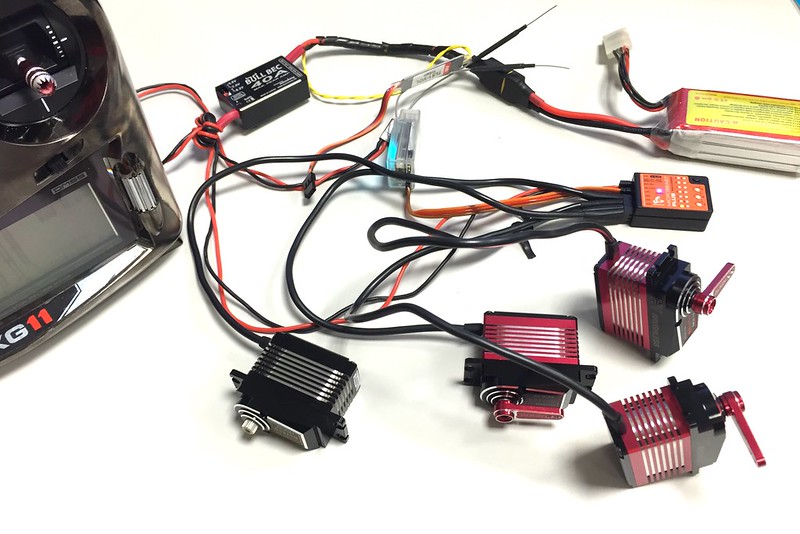
1.野獸送BEC電力
2.StudioX啟動
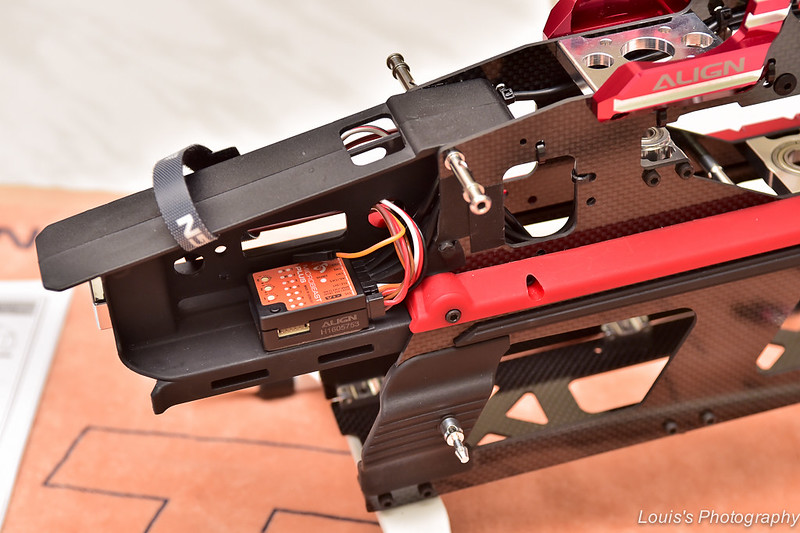
3.USB接上電腦, 照片中, 專用USB 是接到野獸+ 的 SYS 端口. 而紅黑那條是BEC供電

4.第一次使用StudioX, 先建立帳號 (Email, 密碼), 註冊你的MB+(只要按下 register 按鈕, 很快)
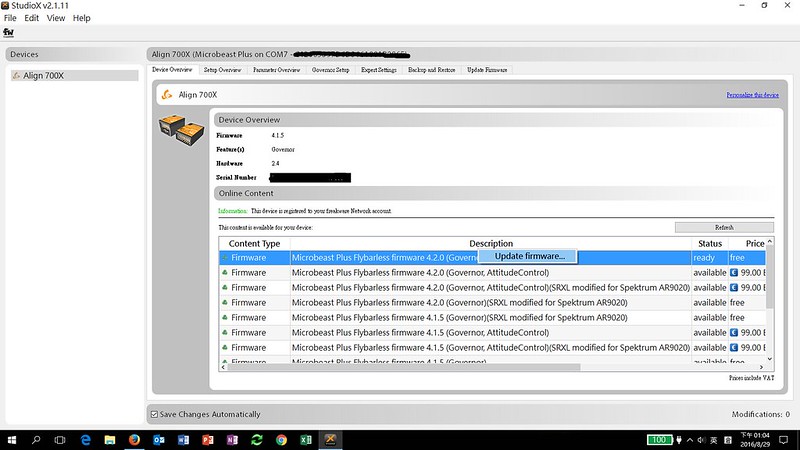
5.接下來會列出可昇級的韌體.
6.選擇你要更新的韌體, 第一次是提出請求(Request) , 這時StudioX會下載更新韌體.
7.完成後, 再選擇一次會更新韌體 (update firmware) , 就會上載至MB+
8.建議新韌體更新完要設定重置再重新設定一次. (重置方式: 在設定模式下,亮A功能時, 按下鈕不放10秒,直到A-N來回燈號閃一次).
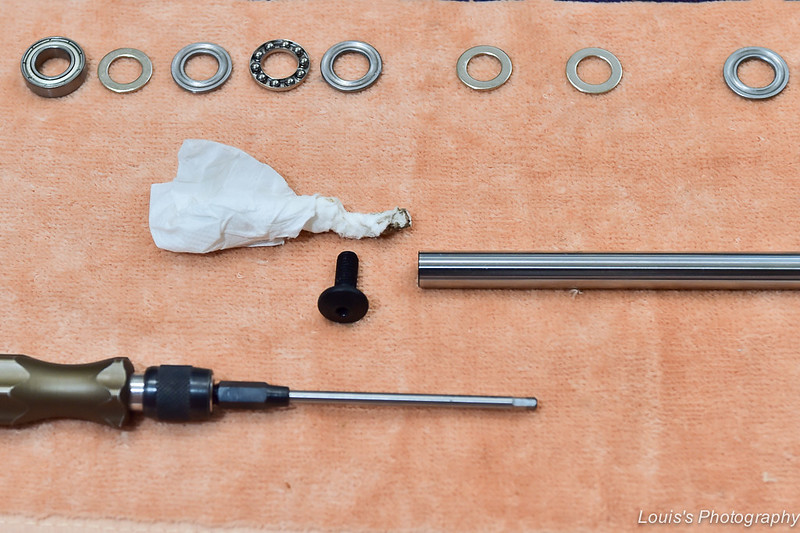
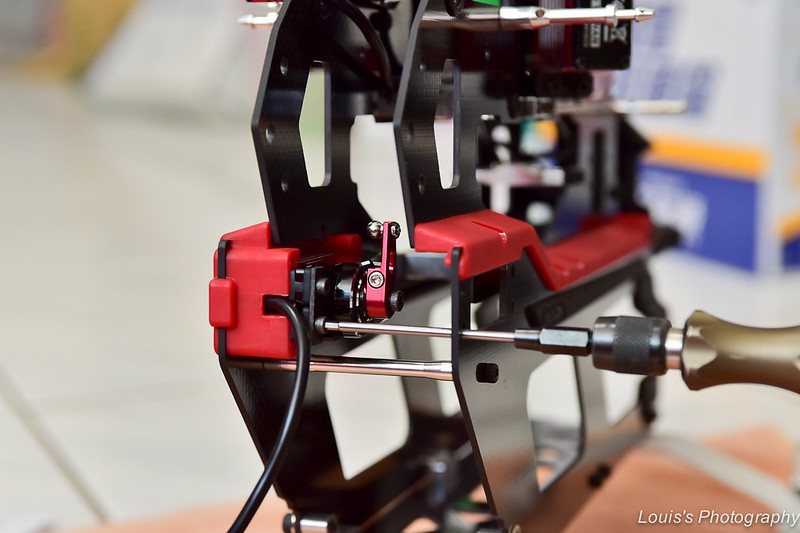
尾舵機金屬臂裁切
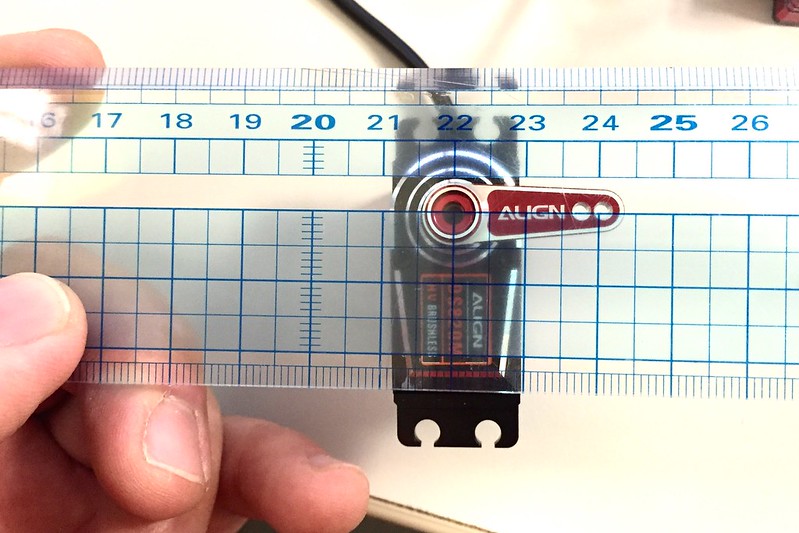
而700X套件裡附的尾舵臂為塑膠舵臂,因為舵機是FUTABA相容輸出齒。所以我換成這種四孔式的,原塑膠舵臂是16.5mm,而這支金屬舵臂內一孔是15.5mm,內二孔是18.5mm。所以我採用內二孔的方式。因為我前一架700E也是用這支舵臂,用18.5mm的鎖尾在解析度及反應上都沒有問題。

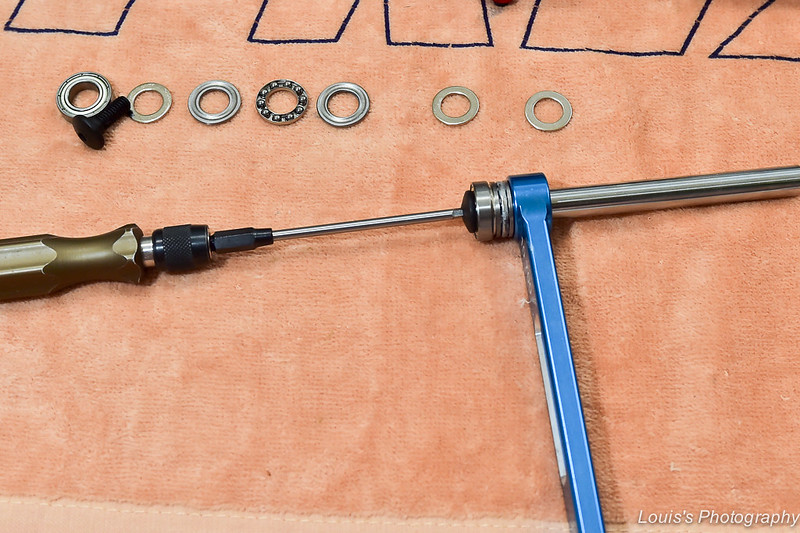
唯一的問題是尾管固定座下方沒有太大空間,舵臂必須裁切。所以要請出手持電鑽用小砂輪片切割,以方便等下上舵臂調中立點時可以用。

總算切割好,真硬@@"

但,切割後的斷面是銀色的,所以用紅色鋼彈筆把斷面塗成紅色。

遙控器設定
700X,是時候了^_^",每次建立新模型,心中總有一股莫名的興奮。先建立一新模型,十字盤種類選Normal / H1 / 1 Servo 90。
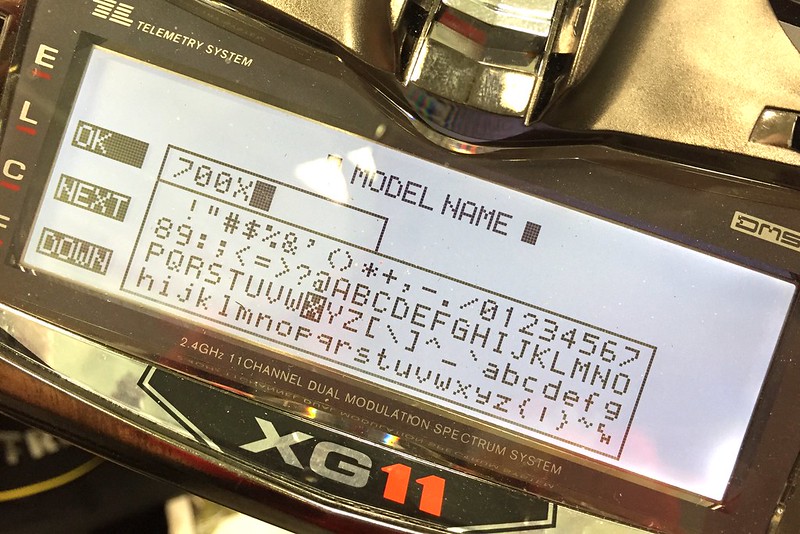
而這次接收是使用JR 613BX,照片中右方那顆接收。

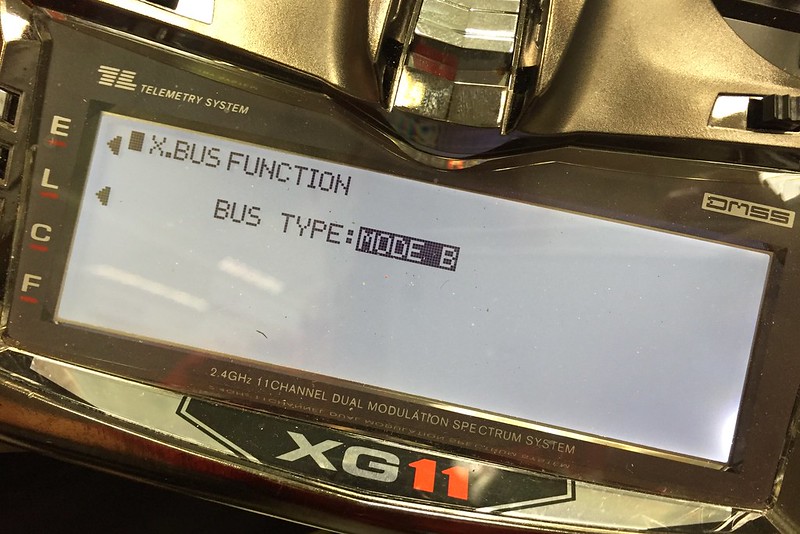
而MB+配合XBUS接收時,遙控器要設定為Mode B。在MB+ 選擇接收種類則要選擇SRXL。另外JR XG控的AILE通道要反轉,不然MB+提供的通道正反轉選項裡不會有對的組合可選。接著遙控器先跟接收完成配對。
舵機中立點調整
我習慣在舵機未鎖上機身前,先做好中立點校正及上舵臂的動作,因為這樣可以利用尺或量角器精準調整舵臂至水平。但MB+預設的接收種類為傳統接收,所以要先選擇相對的接收種類。而在MB+中,JR XBUS對應的是SRXL。
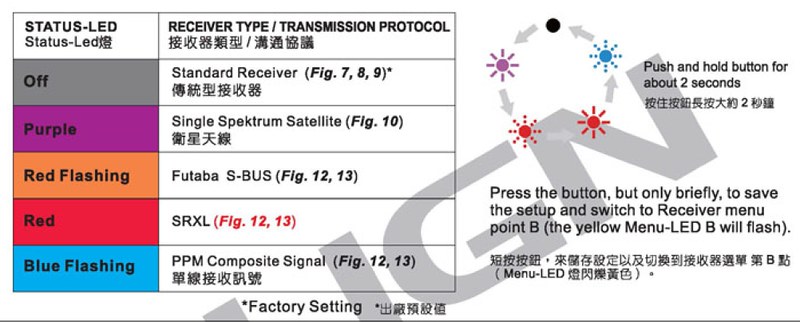
MB+接收通道選擇
1. 按下MB+選擇鈕不放並接上BEC供電,在燈號A閃爍時放開,這時狀態指示燈應為黑色,也就是一般傳統接收。
2.這時按下選擇鈕2秒,就可切換使用接收種類。而SRXL為紅燈。
3.再短按一下選擇鈕,這時指示燈為燈號B,而燈號為藍燈,表示接收種類已設定完成。本應接下來要手動設定各對應通道,這時可以用內建的通道對應就可以了,所以長按選擇扭則會跳到N,準備進行失控保護。
4.這時油門搖桿移到最低點再短按一下選擇鈕則完成失控保護設定。
MB+基本設定至舵機中立點-功能G
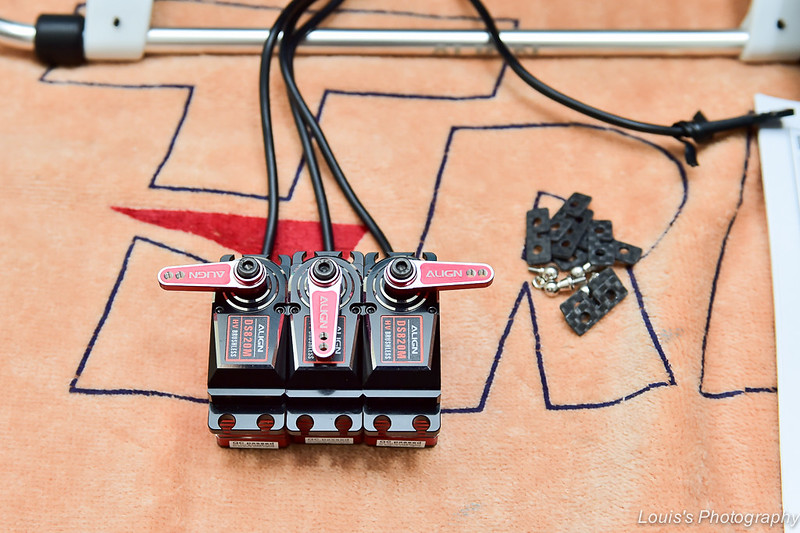
先把舵機含CCPM三顆按照機身上的相對位置擺好,但尾舵先不要接上。接著送電。這時因為接收事先跟遙控器配對完成,MB+也選好接收種類,所以這時MB+應會開機完成。
接著按下選擇鈕直到燈號A持續恆亮不閃爍再放開就進入設定模式。
MB+ 功能A - MB+安裝方向
這次MB+的安裝方向平放,有燈號面朝上,接線口朝機尾,所以應要選擇燈號為紅燈。這跟之前3.2.x 單純只選擇是水平或垂直不同。

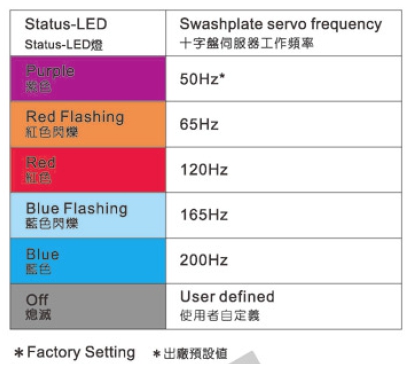
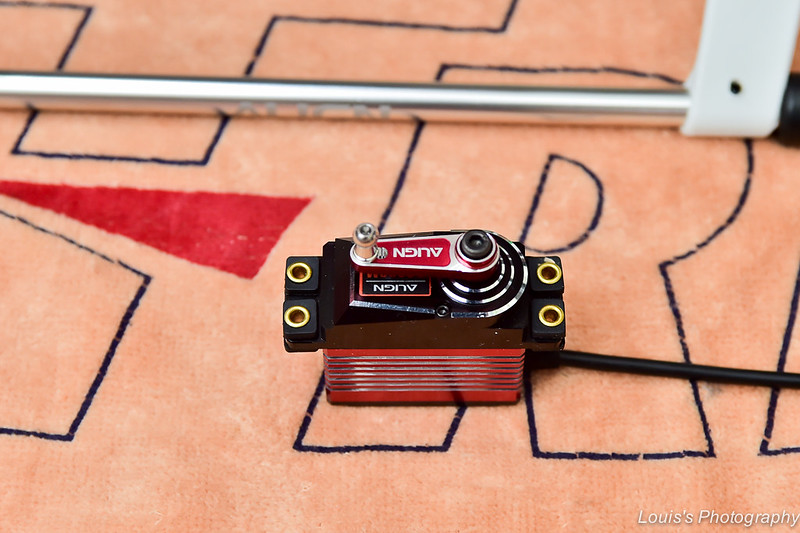
MB+ 功能B : 十字盤伺服機頻率設定。
亞拓CCPM伺服器 DS820M請選200Hz,也就是藍燈。
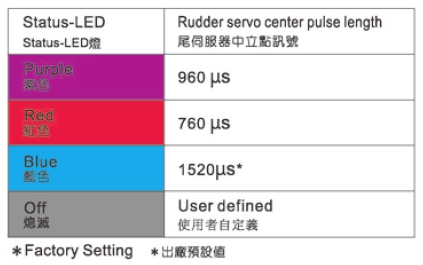
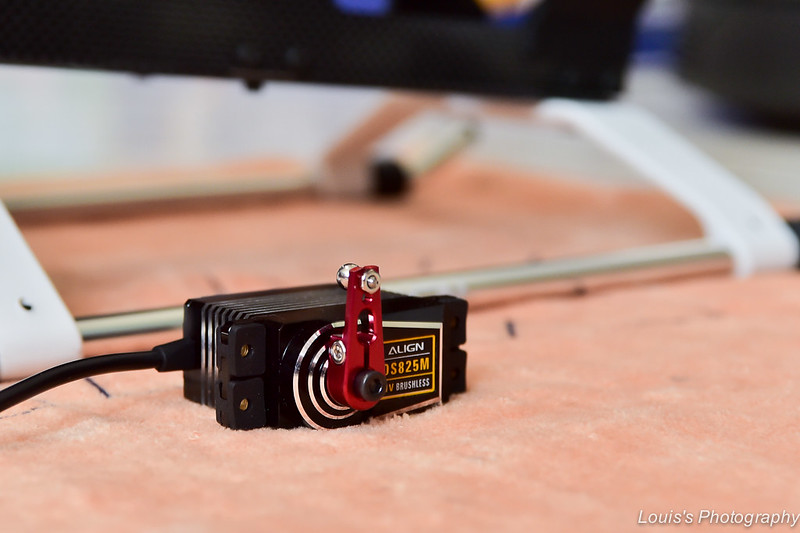
功能C : 尾伺服器寬窄頻設定。
在這裡要選尾舵中立點頻率。亞拓的尾舵伺服器DS825M請選擇1520us,也就是藍燈。
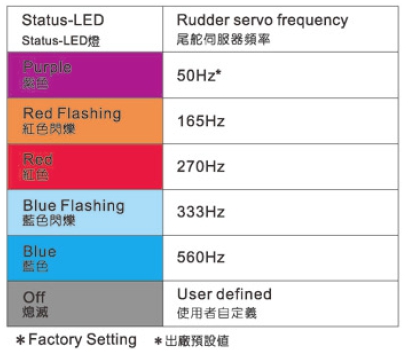
功能D : 尾伺服器工作頻率設定。
這裡要按照使用伺服機的廠牌,型號來選擇合宜的工作頻率。亞拓尾舵伺服器DS825M請選擇333Hz,也就是藍色閃爍。在選擇完尾舵伺服器的工作頻率後,這時才把尾舵伺服器接上MB+的 CH4插槽。
這時尾舵伺服器會停在中立點的位置,在這裡你有4分鐘的時間可以慢慢的調整。而中立點的調整方式跟以前一樣,伺服器舵臂找最接近中立點的齒位上舵臂,不可再用遙控器的subrim調整。如果沒有剛好垂直的齒位,建議找垂直但略偏機首的齒位,這樣尾舵臂的移動相對於滑套行程的機械線性度會較好。
因為亞拓機尾軸滑套在機械左右行程相等時,尾螺距為0度。而在MB+尾中立點時要有2-3度右螺距時,而相對的是右旋尾軸滑套機械行程(靠近尾波箱側)比左旋尾軸滑機械行程來的小。
而舵機舵臂的圓周運動,在舵臂過了45度時。X分量隨著角度增加,增加的量是減少的。也就是說左旋時尾舵臂移動行程變長,如果再加上舵臂如太短,使得舵臂轉動大於45度,在行程尾端,舵機的運動是很沒效率的,線性度變差。舵機要移動較長距離,滑套才能移動一點。
就算再快的舵機,如因用較短的舵臂而使需要的舵機行程變長,效率差的幅度遠比舵機速度能補的。於是在亞拓機上,舵臂應採略偏機首的中立點。這樣才能讓滑套全行程跟舵機舵臂圓周運動線性度最佳範圍匹配,進而保持一定效率及線性度。同樣亞拓機.做2-3度夾角, 尾舵臂完全垂直,跟略偏機首一點, 這時尾機械左右行程一樣沒變. 但, 陀螺儀的左右行程在比例就不同。

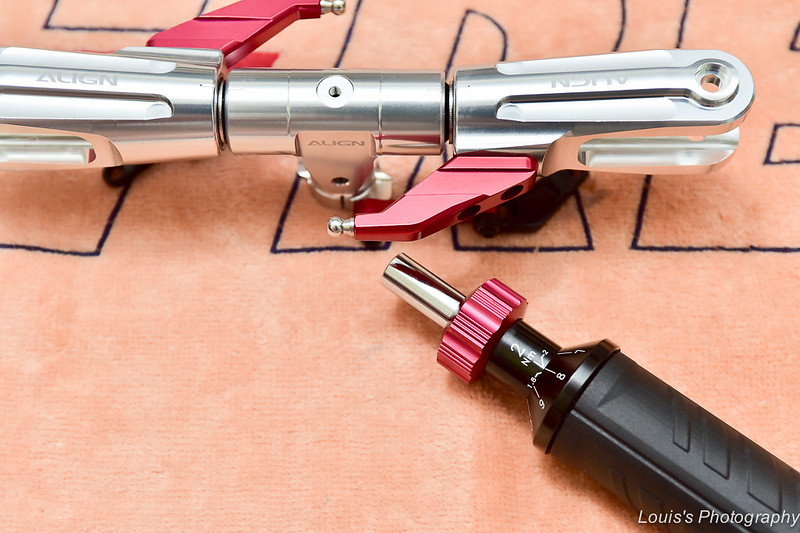
裝上球頭,這金屬舵臂的另一好處是跟CCPM一樣是舵臂本身有螺牙,再加上螺母固定會更穩固。
而尾旋翼則調整拉桿長度至有2-3度右自旋螺距。以450/500級約間距4mm,550-800級間距約10mm。實際夾角要多少則要昇空實測才行。以停懸15-20秒,尾不會慢慢右偏為基準。
功能E : 尾舵行程量設定。
這功能因現在尾管總成尚未安裝,先暫時跳過
設定時,可以慢慢的一次打一點尾舵直到滑套到達邊界且不干涉為止。這時尾舵搖桿回中再等一下,看到MB+指示燈閃了幾下再回到恆亮就表示這邊界已記憶完成。再移向另一邊重覆同樣動作。而恆亮時是紅或藍則看你是移向那一邊來決定。
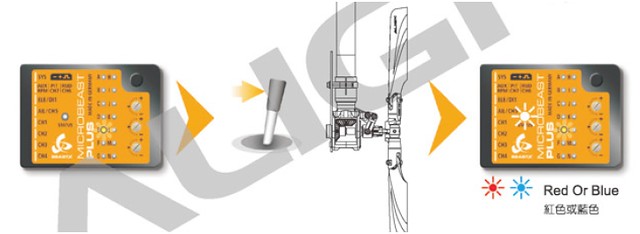
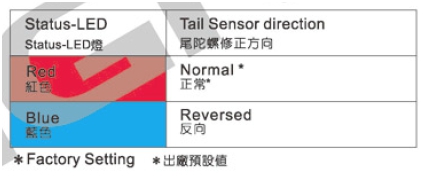
功能F : 設罝尾舵陀螺修正方向設定。
這功能因現在尾管總成尚未安裝,先暫時跳過
在這裡把直昇機尾波箱提起,左右來回晃。當尾波箱往左時,尾軸滑套應要往右;反之尾波箱往右晃時則滑套應往左。如果滑套跟你晃的同向則搖一下尾舵選擇另一個設定。
功能G : 設定十字盤伺服器中立點。
在這功能G就是要調三平,如同之前在3GX DIR裡一樣。
1. 舵機舵臂水平。
2.十字盤水平。
3.集體螺距零度。
而目前先進行舵機舵臂水平調整。剛進功能G時,這時狀態指示燈是熄滅的,這時三個伺服器都停在原來中立點訊號的位置。這時要找最接近水平的齒位上舵臂。接著再逐一調整各伺服器舵臂至水平,調整的方式很簡單,當你打一下尾舵時,可調整的伺服器就會跳一下提示你。一直往同方向打就會三顆輪流跳完再回到未校正的中立點訊號位置。而要調整時,只要上下打昇降搖桿就可進行微調。
而在中立點微調時,可以用尺或量角器等輔助工作來確定舵臂中立點的確在水平位置。不要相信自己眼睛,要相信器材,因為量好完全水平時,眼睛目測大多是歪的。^^
而舵機臂的固定螺絲原為M3x8十字螺絲,在這裡改用芳生M3x8mm圓頭螺絲。
這舵機臂螺絲一樣要上點螺絲膠,但不要太多,就一到二螺牙薄薄就好,可以再上好膠20-30分鐘轉開再旋入。主要是要它的止滑效果。
固定前方2, 3 號舵機及尾舵的M2.5x10mm半圓頭螺絲換成M2.5x10mm圓頭芳生螺絲。
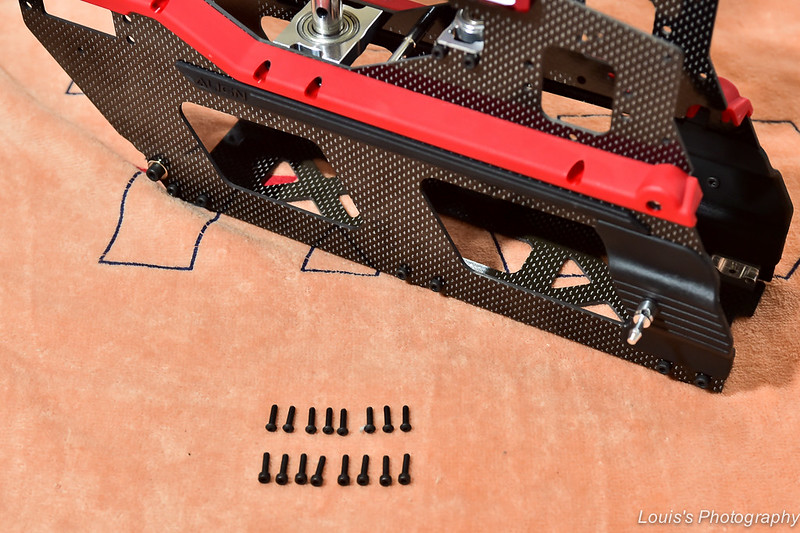
個人習慣換成圓頭螺絲,除非有空間上的限制或考量。
舵機訊號線的杜邦接頭上也用簽字筆先寫好 1 2 3 R 的代號,以方便等下走線完能正確識別相對應的舵機。

舵機鎖到舵機座上時,不可鎖到底。只要鎖到工字型橡膠墊側邊微凸即可。如果不知力道多大,可以先把 1 號舵機鎖好再參考鎖的力道。而700X在 1 號舵機座的設計跟之前也不同了,是採用內嵌固定螺牙座的方式,所以螺絲膠要先點在螺牙座上。
點上藍色T43螺絲膠的 1 號舵機固定座,光線透過螺絲膠呈現的藍色反光有著另一種美感。
舵機耳朵要裝上工字型橡膠墊及銅環,注意工字型橡膠墊的方向性及銅環的方向。工字型橡膠墊一面積較大,另一面較小。較大的那面是朝外要再加上碳纖固定片,較小的那面則向著機身或舵機固定座。
螺絲鎖時要多大力道? 可參考 1 號舵機鎖時的力道。M2.5x10mm螺絲剛好鎖到切齊固定螺牙座,再觀察舵機耳朵上工字型橡膠墊外凸的狀態。而其他舵機如 2號 3號及尾舵則按此力道鎖上。
到這裡就完成了CCPM三顆舵機的固定。
鎖上尾舵機固定座時,訊號線可從靠機尾這端有一走線孔走出。亞拓真是貼心,連這小地方都注意到了。注意螺絲鎖的力道跟之前CCPM一樣,而起子可從對面相對的孔位伸過來鎖定。
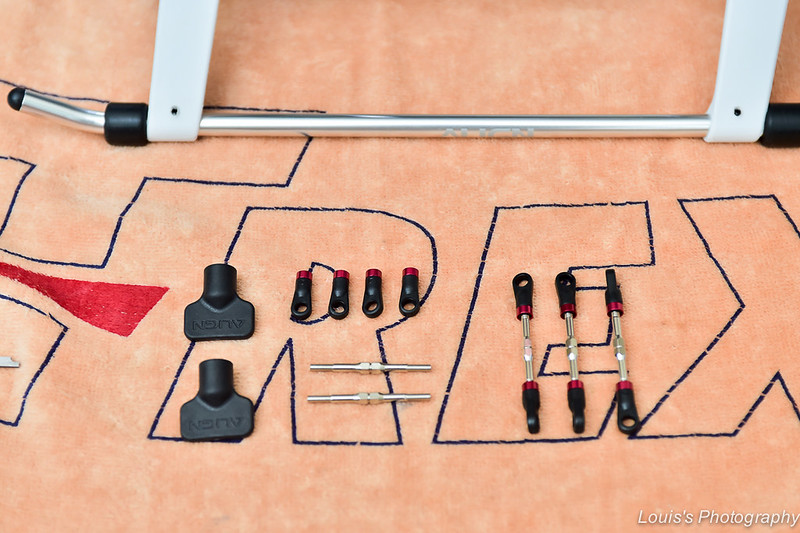
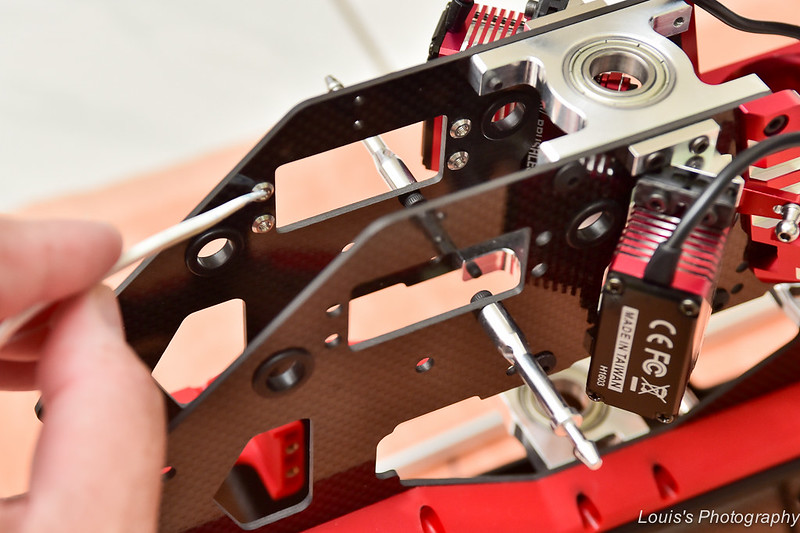
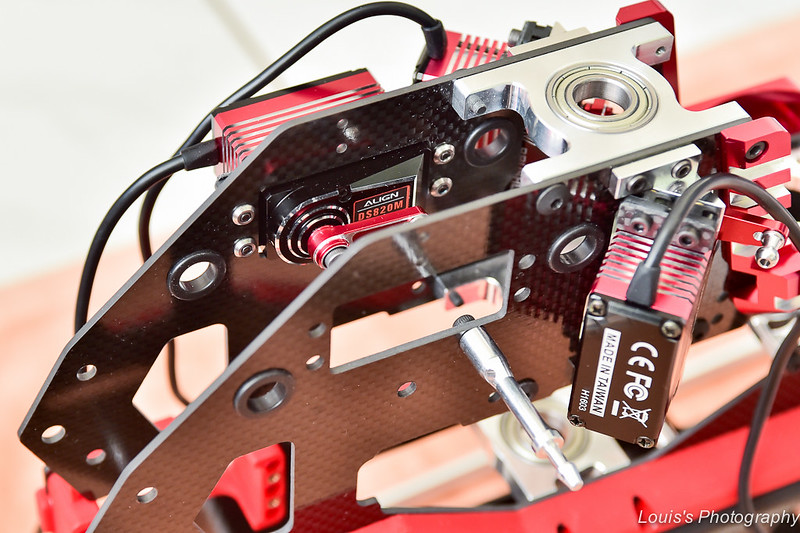
走線
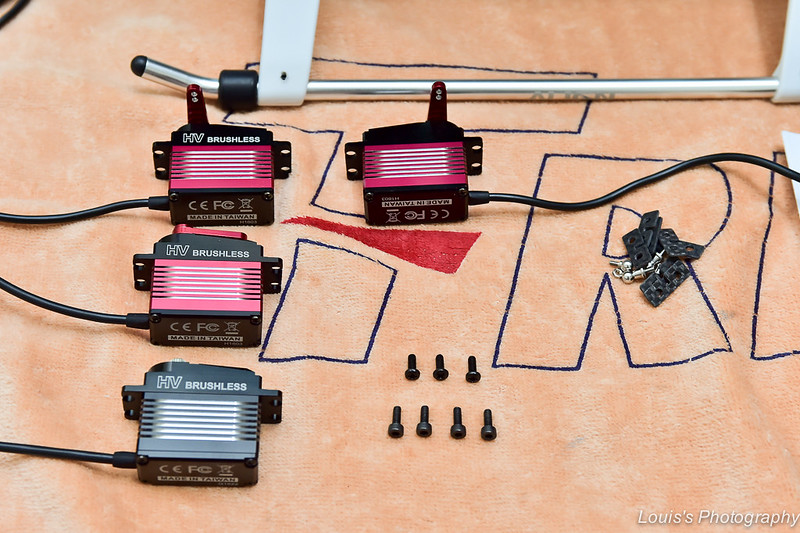
這次700X在設計時就有考量走線的空間及固定孔。加上DS820M, DS825M的訊號線都包有防護層,不用再另外包蛇管防磨,這真是貼心啊 !
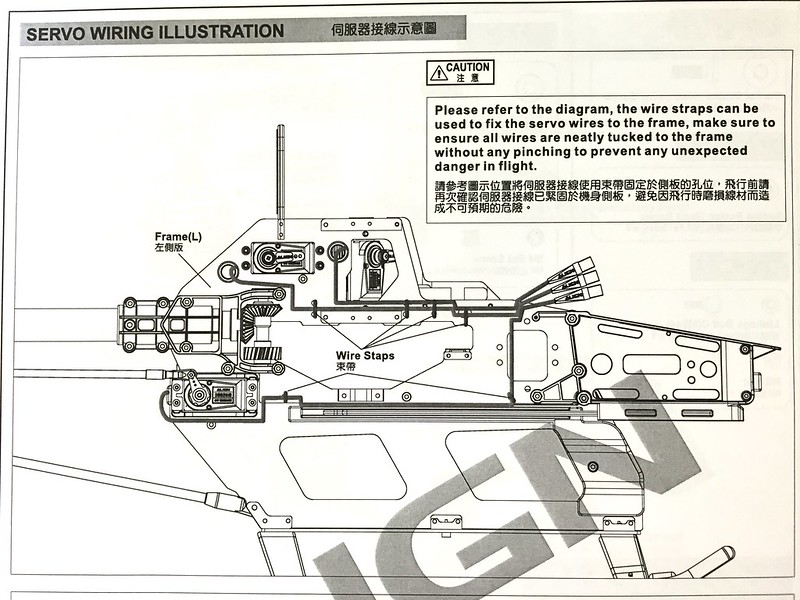
按照說明書的建議,走線很方便又好看。而雖然是窄式機身,工具伸進去走線也游刃有餘。
而很多固定孔位也都留在內側,在外觀上也看不到。這....真是比我還龜毛啊。
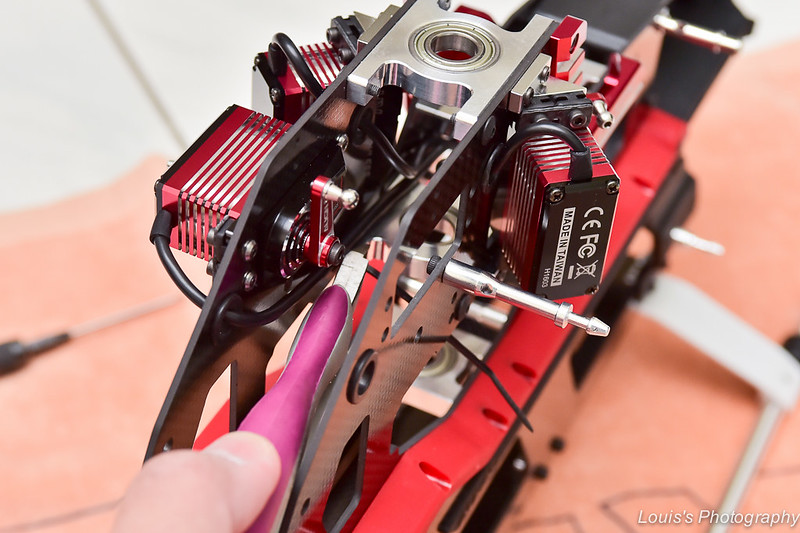
在整線時,也可暫時把馬達固定座拆下。這樣更方便走線整理。
而舵機訊號線雖有包上防磨層能有效的保護訊號線,但另一個角度來考慮的限制就是較不好收納。所以在走線時,考慮到長度以及在內側會不會因為震動而有偏向主軸的風險。所以在 2號舵機剛出來往下走跟 1號舵機交會處,再加上束線固定。
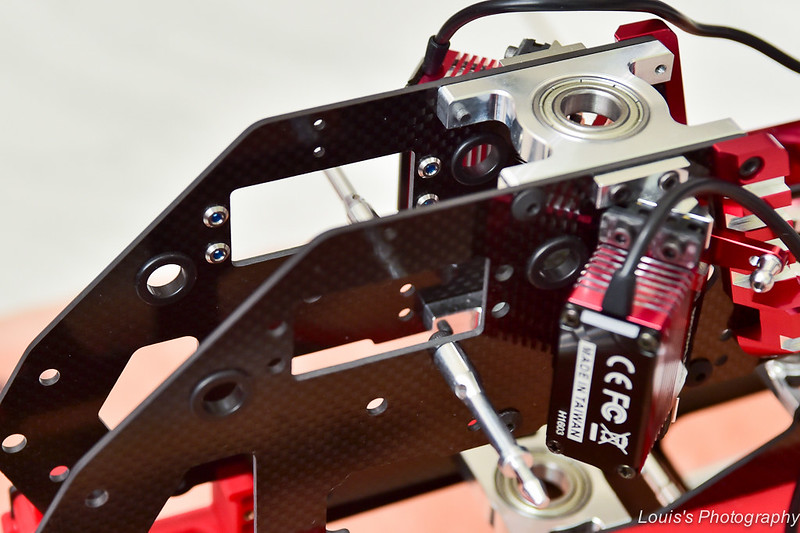
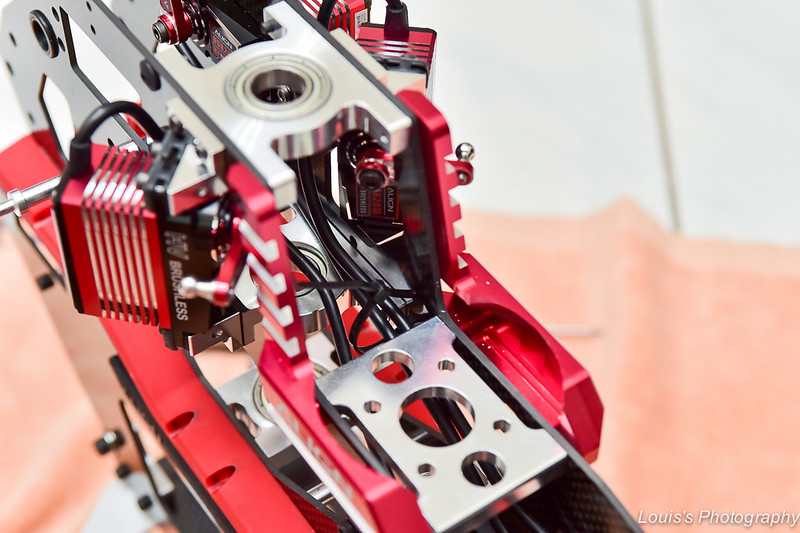
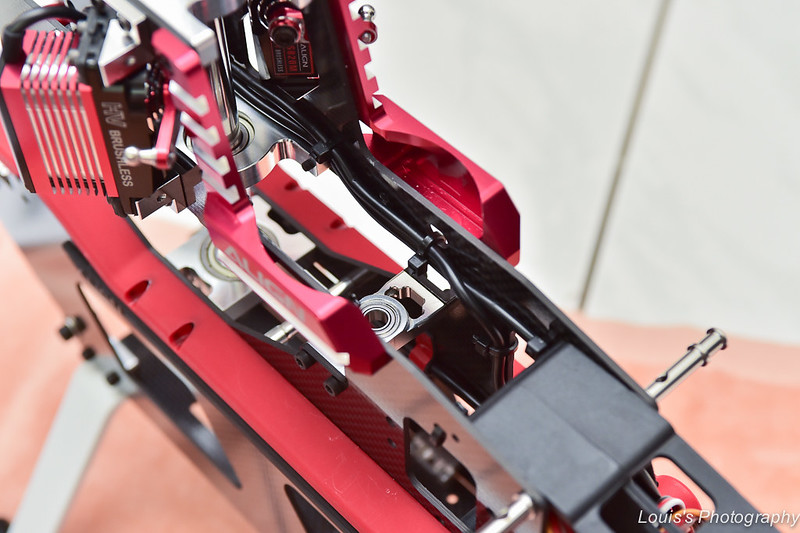
而3號舵機走線考慮最後不好收納餘線的部分,所以往內一出來時,先往後走到後段固定孔位再往前走。這樣除更穩固外,走到前方陀螺儀時,長度也剛好。
而尾舵舵機訊號線也不用再加上延長線就可以走到前端H座。但,在機身內側走時只有前後二個固定孔,感覺中段靠近第三主軸固定座附近的固定力道不足。所以利用3M VHB膠帶分別在第三主軸固定座前後各加一固定點,這樣才讓線的固定更穩。
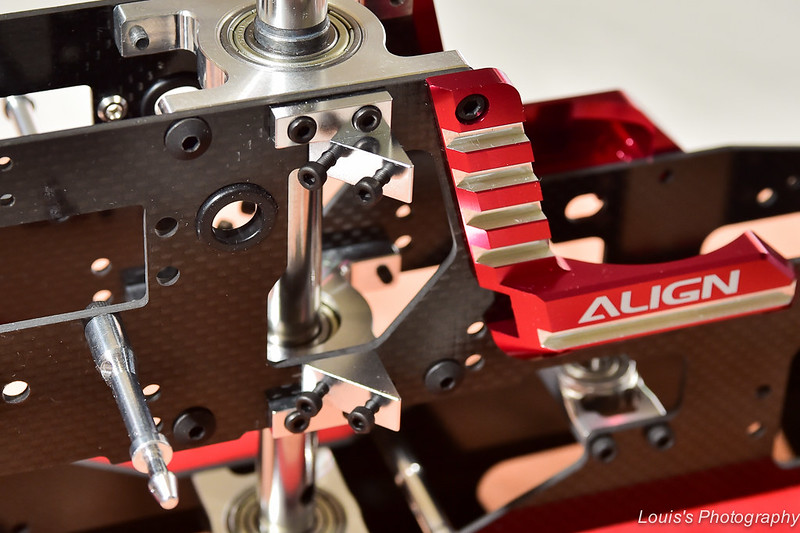
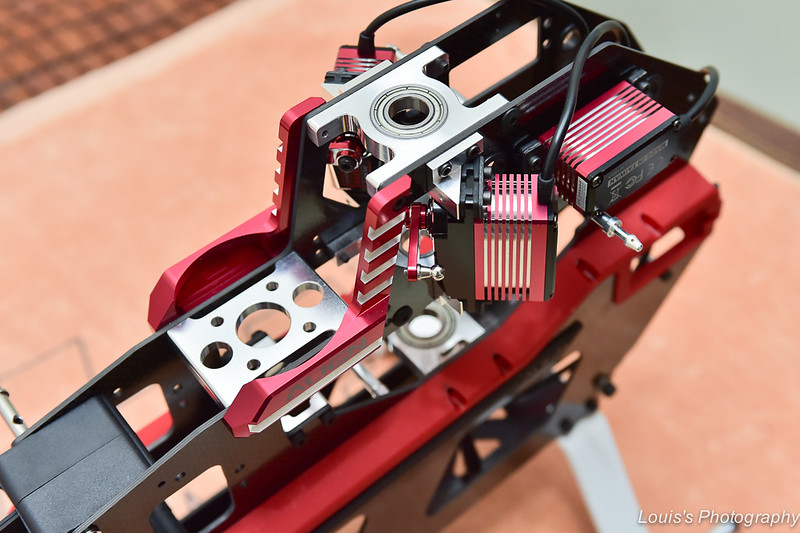
MB+的安裝
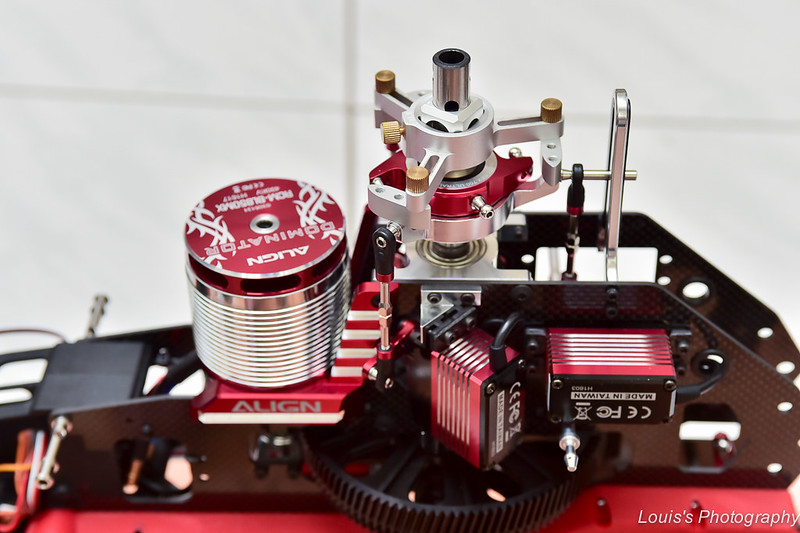
MB+在 700X 安放的位置有二個選擇,一是在H座中間正後上方,一是在H座左側方(由機尾往機首方向)。看個人較喜歡那個位置。這次我選擇在H座左側方,因為這位置是離馬達及電變最遠的位置,可降低干擾的風險。而亞拓也很貼心的在H座左側方平面有一個平台,讓你可以水平的安放MB+。
安放在這裡是我有試過中後上方平台來回二次試裝的選擇,但也不是沒有缺點。
1. MB+第三旋鈕調整較不易。
2.H座由機身過來的下方孔位較小,訊號線必須走上方孔位再往下走到MB+,但訊號線因最後防護套的關係較不易彎。
3.而且這平台座離H座後方太近,如先固定好MB+再接線實不好接。所以我是訊號線先接上MB+再把MB+固定黏貼到H座。

而這走法目前也的確不方便維護,我想我一定會再改走線的。也建議亞拓這H座平台面可以往機首再延伸一點,再加上H座由機身進線孔,下方可以開大一點,這樣線可水平進線,也方便接線維護。
|
上一篇:提醒下一篇:力與美的極致表現 - Align 700X 電裝及主旋翼頭組立番外篇
|


 發表於 2016年9月6日 10:10 PM
發表於 2016年9月6日 10:10 PM
 樓主
樓主